Bir endüksiyon motorunun farklı modlarda, voltajlarda ve frekanslarda mekanik özellikleri
 Asenkron motorların mekanik özellikleri n = f (M) veya n=e(I) olarak ifade edilebilir. Bununla birlikte, asenkron motorların mekanik özellikleri genellikle M = f(S) bağımlılığı şeklinde ifade edilir, burada C — kayma, S = (nc-n) / nc, burada ns — senkron hız.
Asenkron motorların mekanik özellikleri n = f (M) veya n=e(I) olarak ifade edilebilir. Bununla birlikte, asenkron motorların mekanik özellikleri genellikle M = f(S) bağımlılığı şeklinde ifade edilir, burada C — kayma, S = (nc-n) / nc, burada ns — senkron hız.
Uygulamada, mekanik özelliklerin grafiksel yapısı için Kloss formülü adı verilen basitleştirilmiş bir formül kullanılır:

burada: Mk — kritik (maksimum) tork değeri. Bu moment değeri kritik kaymaya karşılık gelir.

burada λm = Mk / Mn
Kloss'un formülü, bir endüksiyon motoru kullanılarak gerçekleştirilen elektrikli tahrikle ilgili sorunları çözmek için kullanılır. Kloss formülünü kullanarak, endüksiyon motorunun pasaport verilerine göre mekanik özelliklerin bir grafiğini oluşturabilirsiniz. Pratik hesaplamalar için, formülde kökten önceki kritik moment belirlenirken sadece artı işareti dikkate alınmalıdır.
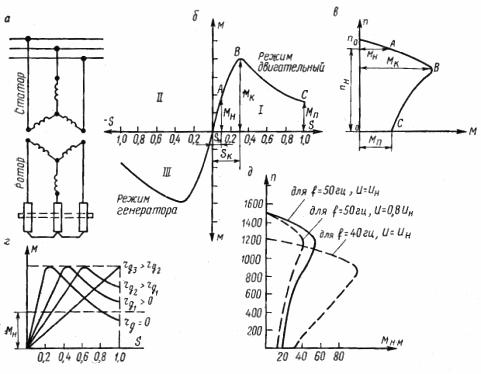
Pirinç. 1.Asenkron motor: a - şematik diyagram, b - mekanik karakteristik M = f (S) - motor ve jeneratör modlarında doğal, c - motor modunda doğal mekanik karakteristik n = f (M), d - yapay bir reostatın mekanik özellikleri , e - farklı voltajlar ve frekanslar için mekanik özellikler.

Sincap kafesli asenkron motor
Olarak Şekil l'de görülebilir. 1, I ve III kadranlarında bulunan bir endüksiyon motorunun mekanik özellikleri. Eğrinin I kadranındaki kısmı pozitif bir kayma değerine karşılık gelir ve asenkron motorun çalışma modunu ve III kadranda jeneratör modunu karakterize eder. Motor modu en büyük pratik ilgi alanıdır.
Motor modunun mekanik özelliklerinin grafiği üç karakteristik nokta içerir: A, B, C ve şartlı olarak iki bölüme ayrılabilir: OB ve BC (Şekil 1, c).
A noktası, motorun nominal torkuna karşılık gelir ve Mn = 9,55•103•(Strn /nn) formülüyle belirlenir.
Bu an karşılık gelir nominal kayma, genel endüstriyel uygulamaya sahip motorlar için %1 ila %7 aralığında bir değere sahiptir, yani Sn = %1 — %7. Aynı zamanda, küçük motorlarda daha fazla kayma var ve büyük motorlarda daha az kayma var.
Şok yüklemeye yönelik yüksek kaymalı motorların Сn~%15'i vardır. Bunlar, örneğin, tek seri AC motorları içerir.
Karakteristiğin C noktası, çalıştırma sırasında motor milinde meydana gelen ilk tork değerine karşılık gelir. Bu an Mp, başlangıç veya başlangıç olarak adlandırılır. Bu durumda kayma bire eşittir ve hız sıfırdır. Başlangıç torku başlangıç torkunun nominal Mp / Mn'ye oranını gösteren referans tablosunun verilerinden belirlemek kolaydır.
Sabit voltaj ve akım frekansı değerlerinde başlangıç torkunun büyüklüğü, rotor devresindeki aktif dirence bağlıdır. Bu durumda, başlangıçta aktif direnç arttıkça, başlangıç torkunun değeri artar ve rotor devresinin aktif direnci motorun toplam endüktif direncine eşit olduğunda maksimum değerine ulaşır. Daha sonra, rotorun aktif direnci arttıkça, başlangıç torkunun değeri sınırda sıfıra doğru düşerek azalır.
C noktası (Şekil 1, b ve c), motoru n = 0 ila n = ns arasındaki tüm devir aralığında geliştirebilecek maksimum momente karşılık gelir... Bu an, kritik (veya devrilme) moment Mk olarak adlandırılır. . Kritik moment aynı zamanda kritik kayma Sk'ye de karşılık gelir. Kritik kayma Sk değeri ve ayrıca nominal kayma Сn değeri ne kadar küçük olursa, mekanik özelliklerin sertliği o kadar büyük olur.
Başlangıç ve kritik anlar, nominal olanlar tarafından belirlenir. Sincap kafesli motorlu elektrik makineleri için GOST'a göre Mn / Mn = 0,9 — 1,2, Mk / Mn = 1,65 — 2,5 koşulu karşılanmalıdır.
Kritik momentin değerinin rotor devresinin aktif direncine bağlı olmadığı, kritik kayma Сk'nin ise bu dirençle doğru orantılı olduğu belirtilmelidir.Bu, rotor devresinin aktif direncindeki bir artışla, kritik momentin değerinin değişmeden kaldığı, ancak tork eğrisinin maksimumunun artan kayma değerlerine kaydığı anlamına gelir (Şekil 1, d).
Kritik torkun büyüklüğü statora uygulanan voltajın karesi ile doğru orantılıdır ve statordaki voltajların frekansının ve akımın frekansının karesi ile ters orantılıdır.
Örneğin, motora sağlanan voltaj, nominal değerin %85'ine eşitse, kritik torkun büyüklüğü, nominal voltajda 0,852 = 0,7225 = %72,25 kritik tork olacaktır.
Frekans değiştirilirken bunun tersi gözlenir. Örneğin, = 60 Hz akım frekansıyla çalışacak şekilde tasarlanmış bir motora, frekansı = 50 Hz olan bir besleme akımı gelirse, kritik an (60/50)2=1,44 kat daha büyük olacaktır. resmi değer frekansı (Şekil 1, e).
Kritik an, motorun anlık aşırı yük kapasitesini karakterize eder, yani motorun herhangi bir zararlı sonuç olmaksızın hangi aşırı yük anına (birkaç saniye içinde) dayanabileceğini gösterir.

Mekanik özelliğin sıfırdan maksimum (kritik) değere kadar olan bölümü (bkz. Şekil 1, biv), özelliğin kararlı kısmı ve BC bölümü (Şekil 1, c) - kararsız kısım olarak adlandırılır.
Bu bölünme, artan kayma ile OF özelliklerinin artan kısmında, yani. hız düştükçe motor tarafından geliştirilen tork artar.Bu, yük arttıkça, yani frenleme torku arttıkça motorun dönme hızının azaldığı ve bununla artan torkun arttığı anlamına gelir. Yük azaldığında ise tam tersine hız artar ve tork azalır. Karakteristiğin kararlı kısmı aralığı boyunca yük değiştikçe, motorun dönüş hızı ve torku değişir.
Motor kritik torktan fazlasını geliştiremez ve frenleme torku daha büyükse motor kaçınılmaz olarak durmalıdır. Dedikleri gibi, bir motor devrilme olur.
U ve I sabitindeki bir mekanik karakteristik ve rotor devresinde ek direncin olmaması doğal bir karakteristik olarak adlandırılır (rotor devresinde ek direnç olmayan sargılı bir rotora sahip sincap kafesli endüksiyon motorunun özelliği). Yapay veya reostatik özellikler, rotor devresindeki ek dirence karşılık gelenler olarak adlandırılır.
Tüm başlangıç tork değerleri farklıdır ve rotor devresinin aktif direncine bağlıdır. Farklı büyüklükteki sürgüler, aynı nominal tork Mn'ye karşılık gelir. Rotor devresinin direnci arttıkça kayma artar ve dolayısıyla motorun hızı düşer.
Aktif direncin rotor devresine dahil edilmesi nedeniyle, kararlı kısımdaki mekanik karakteristik, dirençle orantılı olarak artan kayma yönünde gerilir.Bu, motor hızının mil yüküne bağlı olarak önemli ölçüde değişmeye başladığı ve sert özelliğin yumuşadığı anlamına gelir.