Akımın bir fonksiyonu olarak motor kontrolü
 Stator akımının gücüne bağlı olarak motor kontrolü yapılabilmektedir. Bir sargı rotorlu endüksiyon motorunun akımının bir fonksiyonu olarak başlatma devresi, Şekil 1'de gösterilmektedir. 1 A.
Stator akımının gücüne bağlı olarak motor kontrolü yapılabilmektedir. Bir sargı rotorlu endüksiyon motorunun akımının bir fonksiyonu olarak başlatma devresi, Şekil 1'de gösterilmektedir. 1 A.
Başlama anında akım I1 değerine ulaşır ve belirli bir zaman aralığından sonra I2 değerine düşer (Şekil b). Bu noktada, rotor devresindeki yol verme direncinin bir kısmı otomatik olarak kısa devre olur, akım I1 değerine yükselir ve ardından tekrar I2 değerine düşer, bu da yol alma direncinin başka bir kısmının kısa devre yapmasına neden olur. Bu işlem, başlatma direncinin tüm aşamaları kısa devre edilene kadar tekrarlanır. Bu amaçlar için, sargıları motorun güç devresine dahil edilen bir aşırı akım rölesi kullanılır.
üzerine tıkladığınızda başlama butonu SB1 (bkz. şekil A), ana kontakları motoru rotor devresindeki ortak başlatma direncinde ağa bağlayan kontaktör KM etkinleştirilir. Bu durumda, açma kontakları hızlandırıcı bobin K1'in devresinde olan KA rölesinin bobini güç alır.KA rölesi, tepki süresi K1 kontaktörününkinden daha kısa olacak şekilde ayarlanır. Ayrıca kontaklarını izin verilen maksimum değerde kesmesi başlangıç akımı açık ve akım anahtarlama değerine düştüğünde, başlangıç direnci aşamasının kısa devre anında K1 bobininin KA rölesinin kontakları aracılığıyla açılması nedeniyle tekrar kapanırlar.
Röle KA, hızlanma kontaktörü K1'e enerji verilmeden önce çalışacak ve yol alma direnci tamamen devreye girdiğinde motor hızlanacaktır. Başlangıç anahtarlama akımı azaldıkça KA rölesinin kontakları kapanacak ve K1 bobini açılacaktır. Aynı zamanda, K1 kontağı kapanır, bobinin KA rölesinden bağımsız olarak kendi kendine güç sağlamasını sağlar ve kontrol devresindeki kontak açılarak hızlandırıcı K2'nin erken dahil edilmesini önler.
K1 besleme kontakları, başlatma direncinin kısa devresinin bir parçası olduğundan, stator akımı maksimum değere yükselir ve tetiklendiğinde KA rölesi, K2 bobininin besleme devresindeki kontaklarını açar. Motor yeterli hıza ulaştığında ve stator akımı tekrar anahtarlama akımına düştüğünde, KA rölesinin kontakları kapanacak ve kontaklarına başlama direncinin ikinci aşamasını kısa devre yapan K2 bobinini açacaktır.
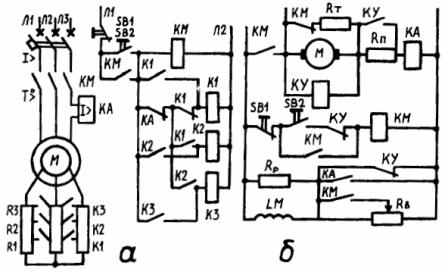
Pirinç. 1. Akıma bağlı olarak kontrol devreleri: a — faz rotorlu asenkron motor; b — Paralel uyarımlı DC motor
Bu durumda stator akımı tekrar yükselir, KA rölesi çalışır ve kontaklarını açar. Bobin K2, yardımcı kontaklar K2 ile kapanması için zamana sahip olacağından güç kaybetmeyecektir.Bir sonraki hızlanmadan sonra stator akımında daha fazla bir düşüş, K3 sargısının açılmasına ve başlangıç direncinin son aşamasını kısa devre yapmasına neden olacaktır. SB düğmesine basmak motoru durdurur ve devre bir sonraki başlatma için hazırdır. 12'lik bir akımda geri dönecek şekilde yapılandırılmış akım röleleri kullanılarak, çeşitli elektrikli sürücüler durdurulabilir ve geri döndürülebilir. Akım fonksiyonundaki kontrol devrelerinin dezavantajı, oldukça fazla sayıda kontaktır.
Birkaç kilovatlık paralel uyarımlı bir DC motorun tersinmez kontrolü için, başlatma reostasının tek bir aşaması kullanılabilir (bkz. Şekil C). Diyagram şunları gösterir: uyarma devresindeki regüle direnci RB; deşarj direnci Rp, uyarma bobini LM ile paralel bağlanır; şebeke bağlantısı kesildiğinde M armatürüne paralel bağlı bir frenleme direnci RT ve marş periyodu sırasında armatür devresine seri olarak bağlanmış bir marş direnci RP. Başlangıçta maksimum akı üretmek için başlangıç konumundaki LM alan bobini tam voltajda açılır.
SB2 butonuna basıldığında, KM kontaktöründen gelen motorun armatürü, RP direnci ile ağa seri bağlanır.Yolverici kontrol rölesi SC, armatür akımının bir fonksiyonu olarak çalışır. Akım arttıkça, KA'nın kapanma kontağı direnci RB manipüle ederek uyarma manyetik akısını arttırır ve akım azaldıkça KA kontağı açılır ve LM bobini reosta RB'nin direnci ile seri bağlanır, çünkü ki manyetik akım azalır.
Motor çalıştırıldığında artan marş armatürü akımı KA rölesini açar ve LM bobini maksimum akı oluşturur. Belirli bir hıza ulaşıldığında, hızlanma kontaktörü K açılır, başlangıç direnci RP kısa devre edilir ve ardından motor doğal özelliklerine göre çalışır. KA rölesi enerjilenmeden önce armatür akımı düştüğünde (motorun hızlanması sonucu), uyarma devresindeki KA kontağı açılacaktır.
LM sargısı, RB direnci ile seri olarak açılacak ve alan akısının zayıflamasına ve buna bağlı olarak armatür akımının artmasına neden olacaktır. KA rölesi tekrar çalışarak akıyı artıracak ve aynı anda motor hızını artıracaktır. Başlatma sırasında, motor RB kontrol reostası tarafından ayarlanan hıza ulaşana kadar uzay aracı rölesi birkaç kez tetiklenir. Akım fonksiyonu olarak çalışan bu tür bir titreşimli cihaz, zamanın fonksiyonu olarak kontrol devrelerine kıyasla devreyi basitleştirir.
SB1 butonuna basılarak motor çalıştırıldığında, açma kontağından KM fren direnci RT'ye giden armatür açılır ve dinamik frenleme otomatik olarak gerçekleştirilir. Durmanın başlangıcında, düzenleyici reosta sürgüsünde KM kontağının açılması nedeniyle manyetik alan biraz zayıflar ve uyarma akımı tüm direnç RB'den geçer. Motor hızı daha da düştükçe, hızlanma kontaktörü K'nin enerjisi kesilir ve uyarma bobini açma kontağı K üzerinden tam hat voltajına açıldığında akı artar, bu da fren torkunda bir artışa neden olur.