Zamanın bir fonksiyonu olarak otomatik kontrol devrelerinin düğümleri
 Elektromanyetik, elektronik, motor ve elektropnömatik otomasyon devrelerinde yaygın olarak kullanılmaktadır. zaman rölesi... En yaygın sinyal süresi dönüştürme şemaları, Şek. 1. Diyagram şek. 1 ve basma süresinden bağımsız olarak belirli bir süre darbe sağlar düğmeler SB. SB düğmesine bastıktan sonra, mekanizmayı açmak için bir dürtü veren K rölesi etkinleştirilir. Darbenin süresi, KT rölesinin zaman gecikmesi ile belirlenir. SB düğmesi, bir KQ komut rölesi ile değiştirilebilir.
Elektromanyetik, elektronik, motor ve elektropnömatik otomasyon devrelerinde yaygın olarak kullanılmaktadır. zaman rölesi... En yaygın sinyal süresi dönüştürme şemaları, Şek. 1. Diyagram şek. 1 ve basma süresinden bağımsız olarak belirli bir süre darbe sağlar düğmeler SB. SB düğmesine bastıktan sonra, mekanizmayı açmak için bir dürtü veren K rölesi etkinleştirilir. Darbenin süresi, KT rölesinin zaman gecikmesi ile belirlenir. SB düğmesi, bir KQ komut rölesi ile değiştirilebilir.
Diyagramlar Şek. 8, b (elektromanyetik zaman rölesi ile) ve şek. 1, c (elektropnömatik veya motorlu zaman rölesi ile), SQ hareket anahtarının hareketinin başlamasından sonra kısa süreli bir darbe sağlamak için kullanılır. Bu ve sonraki şemalarda, kişiler yerine hareket anahtarı KQ röle kontakları kullanılabilir.
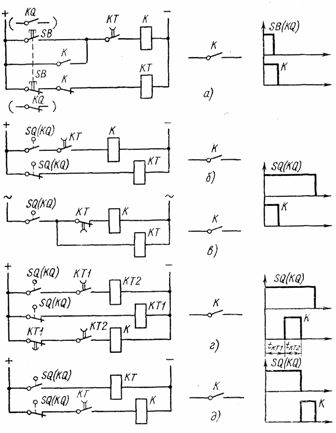
Pirinç. 1. Sinyallerin süresini dönüştürmek için devreler
şema şek.1d, SQ anahtarının hareketinin başlamasından sonra tKT1 zaman gecikmesi ile tKT2 süreli bir darbe sağlar.
Devre düğümü Şekil. 1, e.Bu darbe uygulanmadan önce bir zaman gecikmesi tKT1 gerekiyorsa, şekil 1'deki devre. 1, e. Darbe süresi tKT2'dir.
Konum kontrol devrelerinde, Şekil 1'deki devre. 1g, SQ açma anahtarı üzerindeki etkinin sona ermesinden sonra uzun bir komut verme işlevini yerine getirir. Komut, SQ anahtarında yeni bir eylemin başlangıcında iptal edilir.
Klasik bir şekilde açıp kapatarak kısa bir zaman gecikmesi (1,5 s'ye kadar) elde edilebilir ara röleler bobinlerinin kapasitörler veya diyotlarla şöntlenmesi nedeniyle.
Şek. 2 ve KQ kontağı kapatıldığında, K rölesi C kondansatörünün şarj süresi tarafından belirlenen bir zaman gecikmesi ile aktif hale gelir. KQ kapatıldığında, kondansatörün boşalması nedeniyle K rölesi de gecikmeli olarak geri döner.

Pirinç. 2. Ara rölelerin bobinlerini kondansatör veya diyotlarla şöntleyerek zaman gecikmesi elde etme
Yalnızca röle açıkken bir zaman gecikmesi elde etmek için, Şekil 1'deki devreyi kullanın. 2, b. Röle kapatıldığında gecikme pratikte yoktur, çünkü kondansatör hızlı bir şekilde direnç R'ye boşalır (direnç R'nin direnci, röle bobini K'nin direncinden önemli ölçüde daha azdır). Benzer bir problem, Şekil l'deki devre tarafından çözülür. KQ rölesinin bir açma kontağını kullanan 2c. Bu devrenin dezavantajı, sinyal yokluğunda direnç üzerinden önemli enerji kaybıdır.
Şek. 2d, burada KQ kontağı açıldığında, K rölesi direnç R tarafından kontrol edilen bir zaman gecikmesiyle kapanır.
Şek. Şekil 2'de, KQ komut rölesinin kontağı kapatıldıktan sonra K kapalı olduğunda bir zaman gecikmesi yaratılır.
Komut rölesi KQ etkinleştirildiğinde K rölesinin dönüşünde hafif bir gecikme gerekiyorsa, şekil 2'deki diyagram. 2, e, burada K rölesinin bobini bir diyot tarafından şöntlenir.
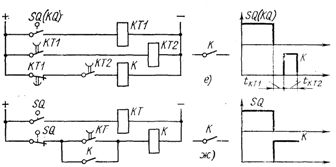
Belirli bir süre ve görev döngüsüne sahip darbeler üretme şeması, Şek. 3 A. Darbenin süresi KT2 rölesinin zaman gecikmesi ile belirlenir, duraklama ise KT1 rölesinin gecikme süresi ile belirlenir.
Pirinç. 3. Darbe üretmek için röle devreleri
İncirde. 3, b, mekanizmanın uzun bir duraklama süresi ile periyodik olarak açılmasının bir diyagramı verilmiştir Kontaktör KM'nin açılma süresi, KT1 rölesinin zaman gecikmesine eşittir, duraklama süresi toplamıdır KT2 ve KTZ rölesinin gecikmeleri. Zamanlama şeması Şekil 1'de gösterilmektedir. 3, yak.
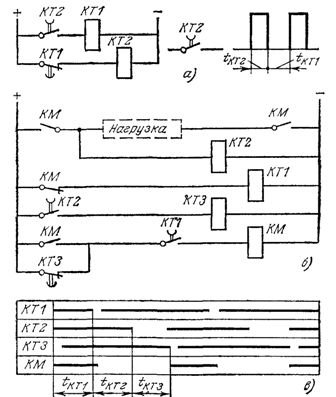
Zaman rölelerinin darbe üreteçlerinin şemaları veya mantıksal öğeler (aşağıya bakın) ayrıca doğrusal mekanizmaların çalışma hızını düzenlemek için kullanılır. Sıcaklık kontrol cihazı da yaygınlaştı ve birçok yönden motor zamanlama rölesine benzer bir KEP-12U komut cihazı içeriyordu. Ünite bir yürütme motoruna, değişken dişlilere, kam tamburuna, anahtara ve 12 kontağa sahiptir.
Hız regülatörleri genellikle KEP-12U cihazının döngüsel çalışması için şemayı kullanır (Şekil 4, a). Devre, devre şeması şekil 2'de gösterilen K1 ve K2 röleleri ve KT.1 ve KT.2 komut cihazının kontakları kullanılarak yapılır. 4, b.
Çalışmaya başlamadan önce, S anahtarını açın.KQ röle kontağı görev döngüsünü başlatmak için bir komut vererek kısa süreliğine kapatıldığında, K1 rölesine enerji verilir ve kendiliğinden kilitlenir. Röle K2, komut cihazı KT'yi açarak etkinleştirilir. Motor sargıları LM1 ve LM2 enerjilenir ve kam tamburu dönmeye başlar. KT.3, KT.4 vb. Cihazın çıkış kontakları, ayarlanan anlarda sırayla kapanır (Şekil 4, b'deki şemaya bakın), doğrusal mekanizmaları açmak için komutlar verir. Döngünün ortasında KT.1 kontağı açılır ve K1 rölesi kapanır.
Şekil 4. KEP-12U cihazı ile hat hız kontrol cihazı
Röle bobini K2, KT.2 cihazının kontağı aracılığıyla güç kaynağını destekler. Tamburu 360° döndürdükten sonra KT.2 kontağı açılır, KEP-12U cihazının motoru durur. Zincir bir sonraki döngü için hazırdır.
Sonuç olarak, elektromanyetik zaman rölelerinin gecikmesinin uzaktan kontrolü için iki şema ele alacağız.
Gecikmeyi kontrol panelinden değiştirmek için, tetik bobinleri KT.1 ve dönüş bobinleri KT ile iki bobinli bir röle devresi kullanabilirsiniz. 2 (manyetik giderme), MDS'si zıt yönlüdür (Şekil 5, a). Serbest bırakma bobininin MDS'si, RP potansiyometresi kullanılarak ayarlanır. Mıknatıslanma ters dönüşü döndürüldükten ve açıldıktan sonra CT'nin tekrar çalışmasını önlemek için, açma bobininin MDS'si armatürü çekmeye yetecek kadar MDS'den düşük olmalı veya devre bobinine kendi röle kapama kontağı takılmalıdır (Şekil 1). 5, bir).
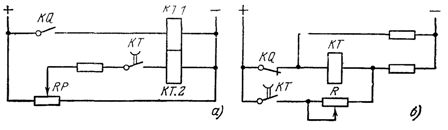
Şekil 5. Zaman rölesi gecikmesinin uzaktan ayarlanması için şemalar
Şek.5, b tek bobin rölesinin zaman gecikmesinde uzaktan değişiklik yapın. KQ kontağı açıldığında, röle bobini KT, direnç R tarafından düzenlenen manyetikliği giderme akımıyla akar. Manyetikliği giderme akımı arttıkça, rölenin gecikmesi azalır ve bunun tersi de geçerlidir. 220 V besleme gerilimi ile 110 V nominal gerilim için bobinli bir röle kullanılır.