DC motorları çalıştırmak ve durdurmak için otomatik kontrol devreleri
 Herhangi bir motorun çalıştırılmasına, güç devresindeki ve kontrol devresindeki belirli anahtarlar eşlik eder. Bu durumda röle-kontaktörlü ve kontaksız cihazlar kullanılır. DC motorların sınırlandırılması için başlangıç akımları motorların rotor ve armatür devresinde, motorlar adım adım hızlandırıldığında kapatılan marş dirençleri bulunur. Başlatma tamamlandığında, başlatma dirençleri tamamen baypas edilir.
Herhangi bir motorun çalıştırılmasına, güç devresindeki ve kontrol devresindeki belirli anahtarlar eşlik eder. Bu durumda röle-kontaktörlü ve kontaksız cihazlar kullanılır. DC motorların sınırlandırılması için başlangıç akımları motorların rotor ve armatür devresinde, motorlar adım adım hızlandırıldığında kapatılan marş dirençleri bulunur. Başlatma tamamlandığında, başlatma dirençleri tamamen baypas edilir.
Motorların frenleme işlemi de otomatikleştirilebilir. Dur komutundan sonra röle-kontaktör ekipmanı yardımıyla güç devrelerinde gerekli anahtarlamalar yapılır. Sıfıra yakın bir hıza yaklaşırken, motorun ağ bağlantısı kesilir. Başlatma sırasında, adımlar düzenli aralıklarla veya diğer parametrelere bağlı olarak kapatılır. Bu, motorun akımını ve hızını değiştirir.
Motor başlatma kontrolü, EMF (veya hız), akım, zaman ve yolun bir fonksiyonu olarak gerçekleştirilir.
Başlangıç DC motorlarının otomatik kontrolü için tipik alt gruplar ve devreler
Bir DC motorun paralel veya bağımsız uyarma ile çalıştırılması, armatür devresine eklenen bir dirençle yapılır. Kalkış akımını sınırlamak için bir direnç gereklidir. Motor hızlandıkça, başlatma direnci adımlanır. Başlatma tamamlandığında direnç tamamen baypas edilecek ve motor doğal mekanik özelliklerine geri dönecektir (Şekil 1). Çalıştırma sırasında motor, yapay özellik 1'e, ardından 2'ye göre ve direnci manevra ettikten sonra - doğal özellik 3'e göre hızlanır.
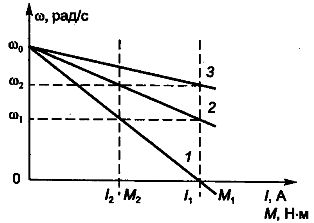
Pirinç. 1. Paralel uyarımlı bir DC motorun mekanik ve elektromekanik özellikleri (ω - açısal dönme hızı; I1 M1 - motorun tepe akımı ve torku; I2 M2 - akım ve anahtarlama momenti)
EMF işlevinde DC motorun (DCM) başlangıç devresi düğümünü göz önünde bulundurun (Şekil 2).
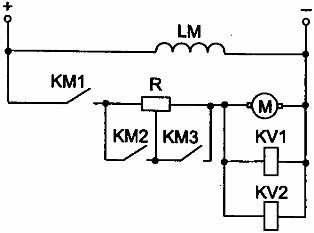
Pirinç. 2. EMF işlevinde DCT'nin paralel uyarım başlangıç devresi düğümü
EMF (veya hız) işlevi röleler, gerilimler ve kontaktörler tarafından kontrol edilir. Gerilim röleleri, farklı armatür emf değerlerinde çalışacak şekilde yapılandırılmıştır. KM1 kontaktörü açıldığında, çalıştırma anındaki KV rölesinin gerilimi çalışma için yeterli değildir. Motor hızlandığında (motor emf'sindeki artış nedeniyle), KV1 rölesi etkinleştirilir, ardından KV2 (röle aktivasyon voltajları karşılık gelen değerlere sahiptir); KM2, KMZ hızlanma kontaktörlerini içerirler ve armatür devresindeki dirençler şöntlenir (kontaktör anahtarlama devreleri şemada gösterilmemiştir; LM, uyarma sargısıdır).
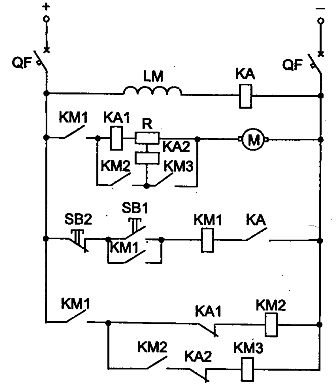
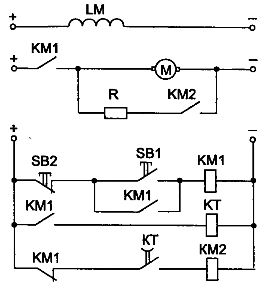
EMF işlevinde bir DC motoru çalıştırma şemasına bakalım (Şek. 3). Motorun açısal hızı genellikle dolaylı olarak sabitlenir, örn.hız ile ilgili büyüklüklerin ölçülmesi. Bir DC motor için böyle bir değer EMF'dir. Başlatma aşağıdaki gibi gerçekleştirilir. QF devre kesici açılır, motor alanı güç kaynağına bağlanır. KA rölesi kontağını etkinleştirir ve kapatır.
Devrenin geri kalan cihazları orijinal konumlarında kalır. Motoru çalıştırmak için yapmanız gerekenler düğmesine basın SB1 «Başlat», ardından KM1 kontaktörü etkinleştirilir ve motoru güç kaynağına bağlar. KM1 kontaktörü kendinden güç alır DC motor, motor armatür devre direnci R ile hızlandırılır.
Motorun hızı arttıkça emf'si ve KV1 ve KV2 rölelerinin bobinlerindeki voltaj artar. ω1 hızında (bkz. Şekil 1.) KV1 rölesi etkinleştirilir. Kontağı ile başlatma direncinin ilk aşamasını açan ve kısa devre yapan kontaktör devresi KM2'deki kontağını kapatır. ω2 hızında KV2 rölesine enerji verilir. Kontağı ile, bir kontakla çalıştırıldığında, başlatma direncinin ikinci başlatma aşamasını kısa devre yapan KMZ kontaktörünün besleme devresini kapatır. Motor doğal mekanik özelliklerine ulaşır ve kalkışı sonlandırır.
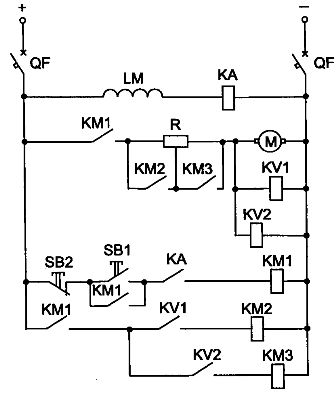
Pirinç. 3. EMF işlevinde DCT'nin paralel uyarımı başlatma şeması
Devrenin doğru çalışması için, KV1 gerilim rölesini ω1 hızına karşılık gelen EMF'de ve KV2 rölesini ω2 hızında çalışacak şekilde ayarlamak gerekir.
Motoru durdurmak için Durdurma düğmesine SB2 basın. Elektrik devresinin bağlantısını kesmek için QF devre kesiciyi açın.
Akım fonksiyonu bir akım rölesi tarafından kontrol edilir. Akı fonksiyonundaki dc motor marş devresi düğümünü göz önünde bulundurun. Şek.Şekil 4'te, ani akım I1'de alan ve minimum akım I2'de bırakan aşırı akım röleleri kullanılır (bkz. Şekil 1). Akım rölelerinin dahili tepki süresi, kontaktör tepki süresinden kısa olmalıdır.
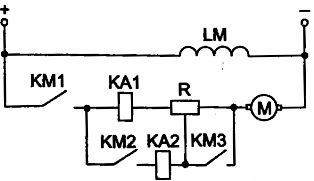
Pirinç. 4. Akıma bağlı olarak paralel uyarma DCT'nin başlangıç devresi düğümü
Motor ivmesi, direncin armatür devresine tam olarak yerleştirilmesiyle başlar. Motor hızlandıkça akım azalır, akım I2 ile KA1 rölesi kaybolur ve kontağı ile marş direncinin ilk kontağını kontağı ile atlayan kontaktör KM2'nin besleme devresini kapatır. Benzer şekilde, direncin ikinci başlatma aşaması kısa devre edilir (röle KA2, kontaktör KMZ). Kontaktör güç devreleri şemada gösterilmemiştir. Motorun çalıştırılması sonunda endüvi devresindeki direnç köprülenecektir.
Bir DC motoru çalıştırmak için devreyi bir akı fonksiyonu olarak düşünün (Şekil 5). Direnç adımlarının dirençleri, motorun açıldığı ve adımların şöntlendiği anda armatür devresindeki akım I1 ve M1 momentinin izin verilen seviyeyi aşmayacağı şekilde seçilir.
DC motorun çalıştırılması QF devre kesicinin açılması ve «Başlat» düğmesine SB1 basılmasıyla gerçekleştirilir. Bu durumda KM1 kontaktörü devreye girer ve kontaklarını kapatır. Kalkış akımı I1, etkisi altında aşırı akım rölesi KA1'in etkinleştirildiği motorun güç devresinden geçer. Kontağı açılır ve KM2 kontaktörü güç almaz.
Pirinç. 5. Akımın bir fonksiyonu olarak paralel uyarımlı DCT başlatma şeması
Akım I2 minimum değerine düştüğünde, KA1 aşırı akım rölesi düşer ve kontağını kapatır.KM2 kontaktörü etkinleştirilir ve ana kontağı aracılığıyla başlatma direncinin ve KA1 rölesinin ilk bölümünü şöntler. Anahtarlama sırasında akım I1 değerine yükselir.
Akım tekrar I1 değerine yükseldiğinde, KM1 kontaktörü açılmaz çünkü bobini KM2 kontağı tarafından atlanır. Akım I1'in etkisi altında, KA2 rölesi etkinleştirilir ve kontağını açar. Hızlanma sürecinde akım tekrar I2 değerine düştüğünde, KA2 rölesi düşer ve KMZ kontaktörü açılır. Çalıştırma tamamlandı, motor doğal mekanik özellikleriyle çalışıyor.
Devrenin doğru çalışması için KA1 ve KA2 rölelerinin tepki sürelerinin kontaktörlerin tepki sürelerinden az olması gerekmektedir. Motoru durdurmak için SB2 «Durdur» düğmesine basın ve devreyi kesmek için QF devre kesiciyi kapatın.
Zaman kontrolü, direnç kademelerini kontaklarıyla kısa devre yapan bir zaman rölesi ve karşılık gelen kontaktörler kullanılarak gerçekleştirilir.
Başlangıç devresi düğümü DC motorunu zamanın bir fonksiyonu olarak düşünün (Şekil 6).Zaman rölesi KT, KM1 açma kontağı aracılığıyla kontrol devresinde voltaj göründüğünde hemen etkinleştirilir. KM1 kontağını açtıktan sonra, zaman rölesi KT güç kaynağını kaybeder ve kontağını bir zaman gecikmesiyle kapatır. KM2 kontaktörü, zaman rölesinin zaman gecikmesine eşit bir zaman aralığından sonra güç alır, kontağını kapatır ve armatür devresindeki direnci şöntler.
Pirinç. 6. Zamanın bir fonksiyonu olarak paralel uyarımın DCT başlangıç devresi düğümü
Zaman işlevinde kontrolün avantajları, kontrol kolaylığı, hızlanma ve yavaşlama sürecinin kararlılığı, elektrikli tahrikin ara hızlarda gecikme olmamasını içerir.
Zamanın bir fonksiyonu olarak bir DC motor paralel uyarımı başlatmak için devreyi düşünün. İncirde. Şekil 7, tersinmez bir DC paralel çalıştırma motorunun bir diyagramını göstermektedir. Fırlatma iki aşamada gerçekleşir. Devre, SB1 «Başlat» ve SB2 «Durdur» düğmelerini, KM1 ... KMZ kontaktörlerini, KT1, KT2 elektromanyetik zaman rölelerini kullanır. QF kesici açılır. Bu durumda, zaman rölesi KT1'in bobini güç alır ve kontaktör KM2'nin devresindeki kontağını açar. Motor, SB1 «Başlat» düğmesine basılarak çalıştırılır. Kontaktör KM1 güç alır ve ana kontağı ile motoru, armatür devresindeki dirençli bir güç kaynağına bağlar.
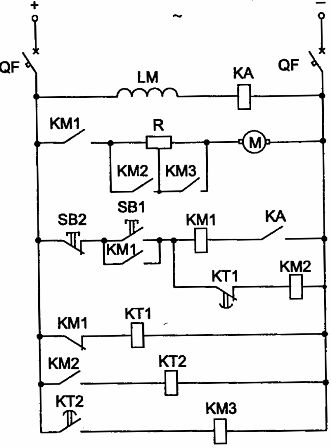
Pirinç. 7. Zamanın bir fonksiyonu olarak bir DC motorun tersinmez kalkış şeması
Düşük akım rölesi KA, motoru uyarma devresinin kesintiye uğramasına karşı korumaya yarar. Normal çalışma sırasında KA rölesi enerjilenir ve KM1 kontaktör devresindeki kontağı kapanarak KM1 kontaktörünü çalışmaya hazırlar. Uyarma devresi kesildiğinde KA rölesi söner, kontağını açar ardından KM1 kontaktörü söner ve motor durur. KM1 kontaktörü çalıştırıldığında, blokaj kontağı kapanır ve KT1 röle devresindeki KM1 kontağı açılır, bu da kapanır ve kontağını bir zaman gecikmesiyle kapatır.
KT1 rölesinin zaman gecikmesine eşit bir zaman aralığından sonra, tetiklenen ve ana kontağı kısa devreleri ile başlatma direncinin bir aşaması olan hızlandırıcı kontaktör KM2'nin besleme devresi kapatılır. Aynı zamanda zaman rölesi KT2'ye enerji verilir. Motor hızlanır. KT2 rölesinin gecikmesine eşit bir zaman aralığından sonra KT2 kontağı kapanır, KMZ hızlanma kontaktörü devreye girer ve ana kontak kontakları ile armatür devresindeki marş direncinin ikinci aşaması. Çalıştırma tamamlanır ve motor doğal mekanik özelliklerine geri döner.
Tipik DC fren kontrol devresi birimleri
DC motor otomatik kontrol sistemleri, dinamik frenleme, ters frenleme ve rejeneratif frenleme kullanır.
Dinamik frenlemede motorun endüvi sargısını ek bir dirence kapatmak ve ikaz sargısını enerjili bırakmak gerekir. Bu frenleme, hızın ve zamanın bir fonksiyonu olarak yapılabilir.
Dinamik frenleme sırasında hızın (EMF) bir fonksiyonu olarak kontrol, şekil 2'de gösterilen şemaya göre yapılabilir. 8. KM1 kontaktörü kesildiğinde motor armatürünün şebekeden bağlantısı kesilir ancak ayrılma anında terminallerinde gerilim vardır. Gerilim rölesi KV, kontağı ile motorun armatürünü direnç R'ye kapatan kontaktör KM2'nin devresindeki kontağını çalıştırır ve kapatır.
Sıfıra yakın hızlarda KV rölesi güç kaybeder. Minimum hızdan tam duruşa daha fazla yavaşlama, statik bir direnç momentinin etkisi altında gerçekleşir.Frenleme verimliliğini artırmak için iki veya üç aşamalı frenleme uygulanabilir.
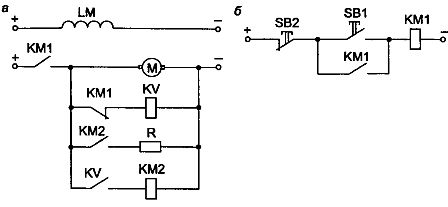
Pirinç. 8. EMF işlevinde dinamik frenlemenin otomatik kontrolü için devre düğümü: a — güç devresi; b - kontrol devresi
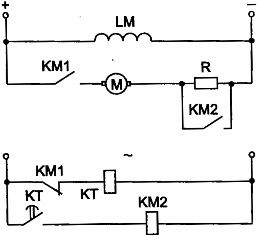
Dinamik frenleme, zamanın bir fonksiyonu olarak sabit motordan bağımsız uyarım, şekil 2'de gösterilen şemaya göre gerçekleştirilir. dokuz.
Pirinç. 9. Zamanın bir fonksiyonu olarak bağımsız uyarmanın DCT dinamik fren devresinin düğümü
Motor çalışırken KT zaman rölesi açıktır ancak fren kontaktörü KM2'nin devresi açıktır. Durdurmak için SB2 "Durdur" düğmesine basmalısınız. Kontaktör KM1 ve zaman rölesi KT güç kaybeder; KM2 kontaktörü devresindeki KM1 kontağı kapandığı ve zaman rölesi KT kontağı bir zaman gecikmesiyle açıldığı için KM2 kontaktörü etkinleştirilir.
Zaman rölesinin zamanlaması için, KM2 kontaktörü güç alır, kontağını kapatır ve motor armatürünü ek direnç R'ye bağlar. Motor dinamik olarak durdurulur. Sonunda KT rölesi bir süre sonra kontağını açar ve KM2 kontaktörünü şebekeden ayırır. Tam durmaya kadar daha fazla frenleme, direnç momentinin etkisi altında gerçekleştirilir Bayan.
Ters etkili frenlemede, motor EMF'si ve şebeke gerilimi uyumlu olarak hareket eder. Akımı sınırlamak için devreye bir direnç yerleştirilir.
DC motorların uyarma kontrolü
Motorun alan sargısı önemli bir endüktansa sahiptir ve motor hızlı bir şekilde kapatılırsa üzerinde büyük bir voltaj oluşabilir ve bu da sargının yalıtımının bozulmasına neden olur. Bunu önlemek için, Şekil 2'de gösterilen devre düğümlerini kullanabilirsiniz.10. Söndürme direnci, diyot üzerinden uyarma bobinine paralel olarak açılır (Şekil 10, b). Bu nedenle, kapatıldıktan sonra akım kısa bir süre dirençten geçer (Şekil 10, a).

Pirinç. 10. Söndürme dirençlerini açmak için devre düğümleri: a — söndürme direnci paralel bağlanır; b - söndürme direnci diyot üzerinden açılır.
Uyarma devresinin kesintiye uğramasına karşı koruma, Şekil l'de gösterilen şemaya göre bir düşük akım rölesi kullanılarak gerçekleştirilir. on bir.

Pirinç. 11. Uyarma devresinin kesintiye uğramasına karşı koruma: a — güç uyarma devresi; b - kontrol devresi
Uyarma bobininde bir kopma olması durumunda, KA rölesinin enerjisi kesilir ve KM kontaktörünün devresinin bağlantısı kesilir.