Tepegöz vinçli elektrikli troleybüs sürücüsü
Tavan vincine sahip bir araba, bir kaldırma cihazının bağımsız bir elemanıdır ve yükleri, teknolojik olarak belirlenmiş bir hareket hızı ve yükün konumlandırılması için gerekli doğrulukla tavan vincinin menzili içinde hareket ettirmek üzere tasarlanmıştır. Boji sürücüsü, tavan vinci ekipmanının ana bileşenlerinden biridir.
Araba, bir tavan vincinin rayında hareket eder. Köprünün kendisi, arabanın hareket yönüne dik bir yönde hareket eder. Yükü hareket ettirebileceğiniz bir kanca (veya elektromıknatıs) ile donatılmış arabaya bir kaldırma mekanizması yerleştirilmiştir. Bojinin hareketi, tavan vincinin teknolojik döngüsünün ayrılmaz bir parçasıdır (Şekil 1).
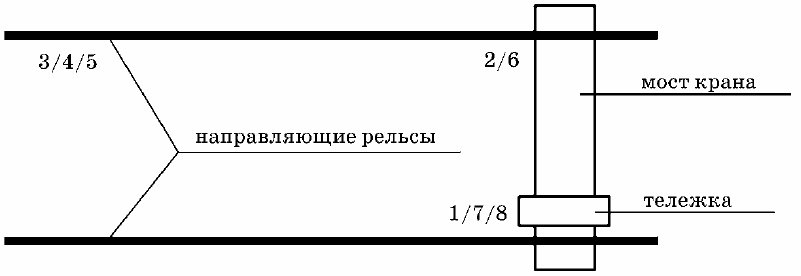
Pirinç. 1. Bir çalışma döngüsünde bir köprü vinci ile operasyonları gerçekleştirme şeması
Bu döngü aşağıdaki işlemlerden oluşur (Şekil 1'de işlem numaraları sayılarla gösterilmiştir):
1 — yükün kaldırılması;
2 — arabayı belirli bir konuma hareket ettirmek;
3 — vincin önceden belirlenmiş bir konuma getirilmesi;
4 — yükün ağırlığını azaltmak;
5 — yükün ağırlığı ile kancayı kaldırmak;
6 — vincin orijinal konumuna getirilmesi;
7 — sepetin orijinal konumuna getirilmesi;
8 — kancayı indirme.
Tavan vincinin işlem döngüsünden de görülebileceği gibi, ikinci ve yedinci işlemlerde araba tahrik motoru açılır. Boji tavan vinci mesafesinde belirli bir konuma yaklaştığında, gerekli frenleme hassasiyetini sağlamak için boji tahrikinin elektrik motoru elektriksel olarak frenlenir.
Ardından motor kapatılır ve mekanik bir fren uygulanır. Ayrıca köprü hareketinin elektrikli tahriki açılır ve yük, teknolojik göreve göre atölye boyunca hareket eder. Belirlenen yere varıldığında vinç durur, yük indirilir ve ardından gerekli teknolojik işlemler gerçekleştirilir.

Tavan vinçli araba hareket mekanizmasının kinematik diyagramı Şekil 2'de gösterilmiştir. Araba hareket mekanizması, tahrik tekerlekleri arasında ortada bir dişli kutusu olacak şekilde şemaya göre yapılmıştır.
Elektrik motoru D'den fren diski T, dişli kutusu P, kavramalar M ve miller B yoluyla tahrik tekerleklere iletilir. Arabayı sabit tutmak için bir fren makarası kullanılır.
Sepetin dört hareket tekerleği ve iki tahrik tekerleği vardır. Vinç arabalarının hareketli tekerlekleri genellikle iki nervürlü yapılır.
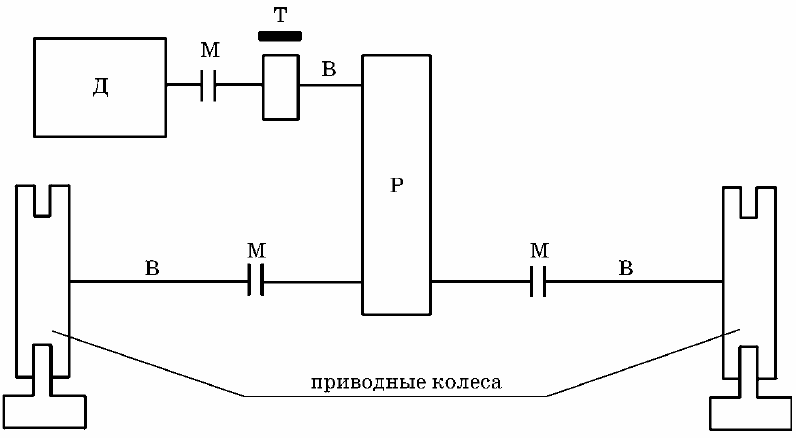
Pirinç. 2. Araba hareket mekanizmasının kinematik diyagramı
Arabanın belirtilen konuma hareket etme süresi, arabanın gerekli ivme ile hızlanma ve yavaşlama süresi dikkate alınarak belirlenecektir.Teknolojik sürecin koşullarına bağlı olarak, arabayı hareket ettirirken takogram, Şekil 3'te gösterilen forma sahip olmalıdır.
Boji mekanizmasının gerekli hızlanma ile belirli bir hıza yumuşak bir şekilde başlamasını sağlamak gerekir. Gerekli konumlandırma doğruluğunu sağlamak için, elektrikli tahrikin düşük hıza geçişle yumuşak bir şekilde yavaşlaması gerekir, ardından araba durur.
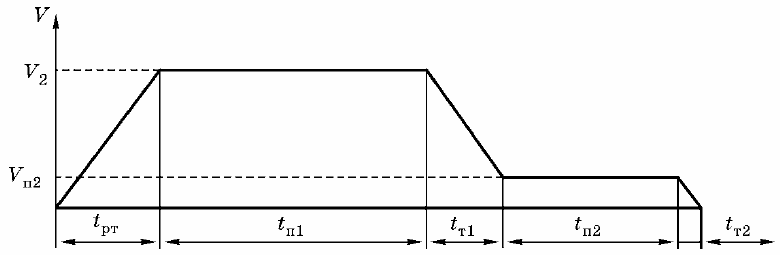
Pirinç. 3. El arabası hareket mekanizmasının takogramı
Ray birleşim yerlerinde bulunan metal yapıya darbeler ile bojinin hareketi, yoğun hızlanma ve yavaşlamalar, makineler yüklendiğinde metal yapının doğal titreşimleri, köprülü vinç bojisi üzerinde bulunan elektrikli ekipmanlar üzerinde çok yoğun mekanik darbelere neden olur. Buna dayanarak, arabayı hareket ettirmek için elektrikli tahrik aşağıdaki gereksinimleri karşılamalıdır:
1) elektrikli tahrik, mekanizmayı hareket halinde başlatma, hareket yönünü tersine çevirme ve mekanizmayı gerekli hızlanma (m / s2) ve doğru konumlandırma doğruluğu (mm) ile durdurma yeteneği sağlamalıdır;
2) elektrikli tahrik, ana şebekeden itibaren düzgün hız kontrolü sağlamalıdır;
3) geliştirilmiş motor torku, mekanizmanın belirli bir yoğunlukta çalışmasını sağlamalıdır;
4) saatte belirli bir motor çalıştırma sayısında, mekanizmanın uzun süre durmasının mümkün olduğu için sargılarının aşırı ısınması olmamalıdır;
5) motor çalışma şartlarına göre seçilmeli, yani uygun tasarıma sahip olmalı, sargıları ısıya dayanıklı ve neme karşı izolasyonlu olmalı;
6) tahrik motoru, sık tahrik çalıştırmaları sırasında geçici akımların akışı üzerinde önemli bir etkiye sahip olan en küçük volan kütlelerine sahip olmalıdır;
7) tahrik motoru, çalışan mekanizmanın gücüne uygun olmalı ve gerekli aşırı yük kapasitesine sahip olmalıdır;
8) elektrikli sürücü, minimum süre ile geçici süreçlerin oluşumunu sağlamalıdır;
9) elektrikli tahrik tasarımında güvenlik ve bakım kolaylığı dikkate alınmalıdır.

Bir üretim tesisinde yatay bir hat üzerinde çalışan hareket mekanizmaları için statik moment, yataklardaki kayma sürtünme kuvvetleri ve tavan vincinin rayları üzerinde dönen boji tekerleklerinin yuvarlanma sürtünmesi ile oluşturulur. Arabanın ileri hareketi sırasında mekanizmanın statik momenti, vincin kaldırma kapasitesi ile belirlenir. Bojinin geri hareketi sırasında mekanizmanın statik momenti, tamamlanmamış bir yük için hesaplanır.
Asenkron sincap kafesli rotor motorları (dahil) tavan vinçlerinin arabasının elektrikli tahriki için değişken frekanslı sürücünün bir parçası olarak), sargılı rotorlu asenkron motorlar ve bağımsız olarak uyarılan DC motorlar.