Elektrikli sürücü kontrol devreleri
 Yolcu asansörlerinin hızına bağlı olarak, aşağıdaki tipte güç kontrol devreleri benimsenmiştir:
Yolcu asansörlerinin hızına bağlı olarak, aşağıdaki tipte güç kontrol devreleri benimsenmiştir:
-
düşük hızlı asansörler sincap kafesli veya faz rotorlu motorlara ve bir düğme veya kol kumandasına sahiptir,
-
yüksek hızlı asansörler - manyetik istasyonlar tarafından kontrol edilen iki veya tek hızlı motorlar veya kontrol düğmeli tristör kontrol istasyonları (TSU-R),
-
yüksek hızlı ve yüksek hızlı asansörler - Farklı uyarma şemalarına sahip "jeneratör - motor" sistemi veya butonlu "tristör dönüştürücü - motor" sistemi ile kontrol edilen DC motorlar,
-
kullanımı verimliliği artırmayı mümkün kılan asenkron valf kaskad zincirleri (AVK) da kullanılabilir. kurulum.
Yolcu asansörleri, yolcu akışına, kaldırma yüksekliğine ve yolculara hizmet veren asansör sayısına bağlı olarak tekli ve grup kontrollü olmak üzere ikiye ayrılmaktadır.
Bekarlar şunları içerir:
a) Yolcuların iniş ve çıkışları sırasında geçiş durakları olmaksızın tek sıra ve çağrılarla çalışan asansörler,
b) Aşağı inerken yolcu bindiren ancak yukarı çıkarken çağrı yasağı olan asansörler,
c) aynı, ancak sonraki yürütmeleriyle birlikte inerken aramaların kaydedilmesiyle.
Grup tarafından işletilen asansörler şunları içerir:
a) Kurulu asansör sayısına bakılmaksızın, iniş yerlerini çağırmak için tek düğmeli (çift kontrol daha sık kullanılır) ve iniş sırasında yolcu binişli asansörler,
b) aynı, ancak biniş ve iniş için ara katlarda yolcuların eksiksiz bir şekilde toplanmasıyla (genellikle idari, eğitimsel ve diğer binalara kurulur).
Ek olarak, devrelerin durumu bir sevk konsolundan izlendiğinde ve birkaç asansör kontrol edildiğinde, birkaç eve ve tüm mahallelere asansör göndermek çok yaygındır.
Asansörlerin hızı, tekli veya grup kontrollü olması fark etmeksizin, düzenlerinin çoğunda olması gereken unsurlar aşağıdaki gibidir:
-
kabin çağırmak ve kabinden talimat vermek için kendinden ayarlı butonlar, yapışkanlı veya kapatmalı butonlar,
-
kabinin yerini ve elektrik devrelerinin durumunu kaydetmek için çeşitli seçim sensörleri ve hassas durdurma eşleştirme cihazları,
-
kaldırma halatlarının durumu, maden ve kabin kapılarının durumu (açık veya kapalı) için sensörler ve kilitler,
-
Kabin yükünün hızını ve derecesini sınırlamak için limit anahtarları,
-
kabinin hareket yönünü ve bazı asansörlerde kabinde bir yükün varlığını gösteren göstergeler.
Bu öğelerden, bir çağrı veya emir gerçekleştiğinde maden arabasının durması gereken yeri ve yukarı veya aşağı hareketini belirleyen konum eşleştirme cihazları (PSC'ler) üzerinde daha ayrıntılı olarak duracağız.Kalan öğeler genellikle diğer derslerden bilinen limit anahtarlarının çeşitli modifikasyonlarıdır.
Yapısal olarak, konum eşleştirme cihazları, makine dairesindeki bir röleye veya temassız seçiciye gönderilen sinyallerle, madenlerde bulunan bir dizi üç konumlu elektromekanik veya endüktif veya manyetik (reed) sensör şeklinde uygulanır (CCP'ler bazen uygulanır) makine dairesinde bulunan merkezi kat üniteleri şeklinde) …
Madende bulunan sensörler, kabine monte dallarla (elektromekanik için) veya manyetik şöntlerle (endüktif veya manyetik şalterler için) etkileşime girer ve makine dairesine kurulu merkezi zemin ünitesine (kademeli kopyalayıcı veya röle rölesi) sinyaller gönderir ve ikincisi iletir ve bir kontrol devresi - alınan komutu yürütmek için bir sinyal.
Araba hareket sinyalleri için sensörleri arabanın yukarısına veya aşağısına yerleştirmek (daha az kabloya ihtiyaç vardır) ve madenlerde gerekli noktalara manyetik şöntler kurmak daha uygundur. Bu durumda, dijital kontrol ile, şaft boyunca şöntlerin kurulu olduğu kolonların sayısı, ikili veya başka bir kodda iletilen kat numarasının bit sayısına eşittir.
Üç konumlu elektromekanik anahtarlar, bir kıvırma düzeneği ile kabinin yukarı veya aşağı hareketine veya durmasına karşılık gelen konumlardan birine hareket ettirilir.Bu durumda kabin hareket halindeyken geçilen katlardaki anahtarların kontakları uç konumlardan birine alınarak çağrı ve emir zincirinin hareketine hazırlanır ve kabin durduğunda anahtar orta konuma taşınarak yön kontaktörlerinden kontrol devresini kapatır ve böylece sipariş veya çağrı düğmesine yanlışlıkla basıldığında kabinin yerden çıkmasını engeller.
Asansör kabininin nispeten hassas frenlemesini sağlamak için son zamanlarda kontrol devrelerinde temassız endüktif veya kontak contalı manyetik kontrollü (reed) sensörler kullanılmaya başlandı. Bu sensörler hem madene hem de kabine monte edilmiştir: madende seçim (yavaşlama) için sensörler vardır ve kabinde hassas durdurma için bir sensör vardır. Sensörlerle arayüz oluşturmak için, kokpite bir fener manyetik seçici şant yerleştirilir ve şafta (her katta) ferromanyetik hassas durdurma şöntleri yerleştirilir.
Endüktif sensörler, bir mahfaza içine alınmış bir bobine sahip açık U-şekilli bir manyetik devreden oluşur. Yürütme rölesinin sargısı buna seri bağlanır ve bunlara bir alternatif akım gerilimi (U) uygulanır.
Açık bir manyetik devrede, bobinden geçen manyetik akı küçüktür. Bu nedenle e.m.f. ve bobin tellerindeki kendi kendine endüksiyon akımı ve bunun neden olduğu endüktif direnç (X) pratikte yoktur, bu nedenle bobinin direnci aktiftir (R). Seri bağlı bobinlerdeki akım nispeten büyüktür; kontak sistemindeki kontakların kapanmasını taklit eder (röle açılır).
Şönt U şeklindeki manyetik devreyi kapattığında, bobininden geçen manyetik akı artar ve dolayısıyla emk artar. kendi kendine endüktans ve buna bağlı olarak bobinin endüktif direnci. Sonuç olarak, seri bağlı bobinlerdeki akım azalır ve kontak sisteminde devrenin açılmasını simüle eder (yürütme rölesi kapatılır).
Manyetik anahtar, oluğun bir tarafında, içinde vakum bulunan iki sızdırmaz cam şişenin ve ilgili asansör kontrol devrelerine bağlı yay plakalarına sabitlenmiş kontakların yerleştirildiği U-şekilli bir gövdedir. Yuvanın diğer tarafında kalıcı bir mıknatıs bulunur. Bu tür sensörlerin çalışma elemanı, asansör kabini hareket ettiğinde U şeklindeki kesitten geçen ferromanyetik şönttür.
Bu sensörlerin çalışma prensibi şu şekildedir: manyetik anahtarların kontak plakalarının yay kuvvetleri, kalıcı bir mıknatısın alanı üzerlerine etki etmezse, normalde açık kontaklar açık ve normalde kapalı kontaklar kapalıdır, yani bu kontakların bağlı olduğu devreler açılacak veya kapanacaktır.
Bu küçük indükleme anahtarı durumu, ferromanyetik şönt U-biçimli bir gövdenin yivindeyken olacaktır, çünkü kalıcı mıknatısın manyetik alan çizgileri şönt boyunca kapalıdır. Şönt oluktan çıktıktan sonra, manyetik alan çizgileri şanta doğru kapanır. yay hareketinin üstesinden gelen plakalar ve manyetik anahtar kontakları ve dolayısıyla bağlı oldukları devreler zıt duruma geçer.

Asansör kontrol şemalarının ana özelliklerini yansıtan bir örnek olarak, Şekil 1'de gösterilen ilgili durakları olmayan tek bir asansör için kontrol şemasını düşünün. 1. Asansör dört kata hizmet vermektedir; yürütme motoru olarak iki hızlı asenkron motor M kullanılır.
Düşük (Ml) veya yüksek (B) motor devirlerinin dahil edilmesi, karşılık gelen Ml ve B kontaktörleri tarafından gerçekleştirilir. Motorun dönüş yönü, B ve H kontaktörleri tarafından belirlenir, yavaşlama - ek bir direnç P ile, durma - elektromanyetik fren ET ile.
Zemin anahtarları olarak kullanılır temassız endüktif sensörler (DTS, DTOV ve DTON) röle bobinleri (RIS, RITOV, RITON) ile seri olarak bağlanmıştır. TTP sensörleri, asansör tahrikini yüksek hıza getirmek ve yavaşlamak için bir impuls vermek için kullanılırken, DTOV ve DTON sensörleri, asansörü ilgili katın kat seviyesinde hassas bir şekilde durdurmak için tasarlanmış ve kabin üzerine yerleştirilmiştir. onlar için manyetik şantlar şaftın miline takılır.
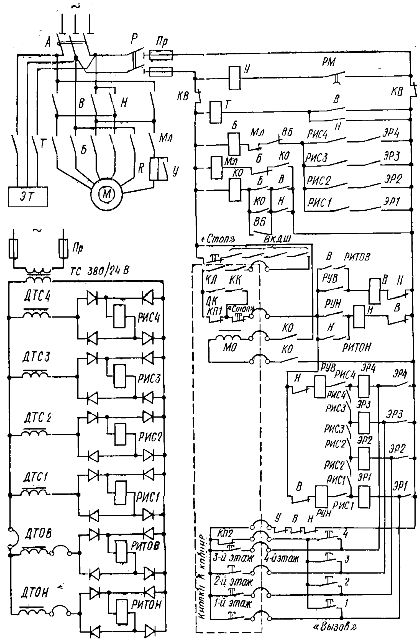
Pirinç. 1. Tek asansör kontrolünün şematik diyagramı
Devrenin geri kalan elemanlarının amacını ve işleyişini, bir yolcu ile bir kabini 1. kattan 3. kata taşıma örneğini kullanarak ele alalım; Acil durum modlarında kabinin aşağı yukarı hareketi kapalı olup kabin zemin kattadır. Bu durumda birinci katın rölesine ek olarak RIS rölesinin bobinleri anma akımından akar.
«3. kat» düğmesine basıldığında, aşağıdaki elektrik devresi oluşturulur: ağ fazı — ayırıcının kutbu P — sigorta Pr — limit anahtarı KB — «Durdur» düğmesi — maden kapılarının kilitlenmesi D1 — D4 — gerdirme kontakları halat KK — emniyet limit anahtarı KL — kabin kapısı anahtarları DK — «Durdur» düğmesinin kontakları — açma bloğu -kontağı Н — röle bobini RUV — RIS4 ve RISZ rölelerinin kapama kontakları (bu rölelerin bobinleri akım taşır) — bobin ERZ kat rölesi — «3. kat» düğmesi — açma blokları — U, B, N kontaktörlerinin kontakları — limit anahtarı KB — sigorta R — ayırıcı kutbu P — şebeke fazı.
RUV ve ER3 rölesi harekete geçtikten sonra, ileri hareket kontaktörü B, hızlı hareket kontaktörü B (bobin devresinde B — blok kontağı ML — yüksek hız anahtarı VB — röle kontakları RISZ ve ER3) açılır. B ve B kontakları kapalı olduğunda, motor şebekeye bağlanır, kontaktör T, serbest bırakma kasnağı ve şönt solenoid MO'yu açan ve düşük hızlı kontaktör bobini Ml devresini hazırlayan şönt kontaktörü KO, açıldı. Strok geri çekilerek kilitleme kolunu serbest bırakır ve kabin hareket etmeye başlar.
Kabin üçüncü kata yaklaştığında, ferromanyetik şönt TTSZ sensörünün bobinini kapatır, direnci artar ve RISZ rölesi kaybolarak ER3 ve RUV rölelerini kapatır. Sonuç olarak, kontaktör B kaybolur, kontağını kapatır, düşük hız kontaktörünü Ml açar ve kontaktör B açık kalır, çünkü araç hareket halindeyken, hassas fren sensörünün manyetik devresi henüz kapanmamıştır, bu nedenle, RITOV kontağı hala açık değil.Statorun bir fazında tanıtılan bir direnç R ile jeneratör modunda çalışan motor düşük hızda durdurulur.
Kabinin zemini zeminin zemini ile hizalanır hizalanmaz, manyetik şönt tam durdurma sensörü DTOV'un bobininin manyetik devresini kapatır, RITOV rölesi kaybolur ve B, ardından KO ve son olarak ML kontaktörleri döndürülür Sonuç olarak, motor elektromıknatısı ve frenin şebekeden bağlantısı kesilir, mekanik fren uygulanır ve kabin durdurulur.
Asansörleri yalnızca kabini indirirken geçen duraklarla kontrol etmek için toplu bir şema veya tamamen toplu bir şema, yani. araba yukarı ve aşağı hareket ederken dururken, şekil 2'de tartışılana benzer bir şemada gereklidir. 1, bazı eklemeler yapın. Örneğin, iki hızlı bir motor devresinde, ID endüktif sensörler, RIS rölesi ve her katta bulunan çağrı ve sipariş düğmeleri, Şekil 1'de gösterildiği gibi dahil edilmiştir. 2.
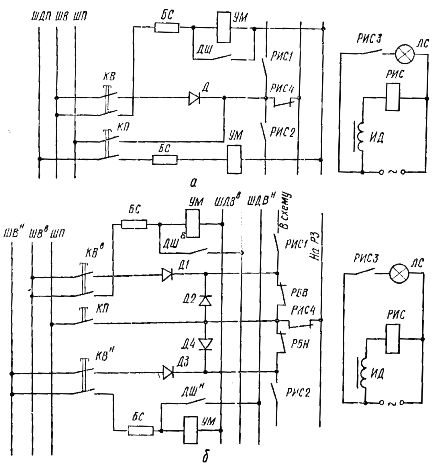
Pirinç. 2. Toplu asansör kontrol şemalarına (tek kat) yapılan eklemelerin parçaları
Kabin indirilirken geçiş duraklarının olduğu bir şemada (Şekil 2, a), çağrılar ve emirler ayrı yapışkan düğmelerle verilir ve bu nedenle istenildiği zaman kaydedilebilir ve hareket süresi dışında şemaya hemen iletilebilir. Aktarma kontaklarının besleme barası yürütme devresine yapılan çağrılar, pozitif baradan gelen seçici kontaklar tarafından kapatıldığında, yolcularla birlikte kabin yukarı kaldırılır.
Eksiksiz seçici kontrol şemasında (Şekil 2, b), biniş (ШДВв) ve alçaltma (ШДВн) kabinleri için ek olarak zil devreleri vardır, RBV ve RBN engelleme rölelerinin kontakları yürütme devresinin seçici kesit devresinin kontaklarına bağlanır .
Şek. 1 ve 2, katta bir kabin olmaması durumunda, ID endüktif sensörün ve RIS rölesinin bobinlerine enerji verilir. Bu nedenle, komut komut düğmesine bastığınızda veya KV'yi aradığınızda (DSh'nin bu katındaki maden kapılarının kontakları tarafından aşılana kadar UM tutma mıknatısları tarafından açık durumda tutulurlar), bir devre oluşur (değil). Şekillerde gösterilmiştir), varış katı otoparkın zemininden yüksekse yukarı kontrol rölesi RUV'yi veya varış katı otoparkın altındaysa aşağı kontrol rölesi LVL'yi içerir.
Kabinin çağrı katına varmasından sonra, endüktif sensörün kimliği havalandırılır, RIS rölesi kapatılır, kontakları açılır, bu da RUV veya RUN rölesini ve LS lambasını kapatır (araç durur) ve RIS4 kontağı kapatılarak kabinden gelen emrin yerine getirilmesi için devre hazırlanır.
Komple toplu devrede, arabanın otoparkının zeminindeki RIS1 ve RIS2 kontakları ile bölünen devre, sadece bu kontaklar tarafından değil, aynı zamanda blokaj rölesinin yukarı RBV veya aşağı RBN kontakları (bobinleri) tarafından da kesilir. Şemada gösterilmemiştir) ve yükseltme, indirme ve sıralama devreleri, D1 - D4 ayırıcı diyotlarla birbirinden ayrılır.
Çağır veya sipariş ver butonuna basmadan önce aracın gidiş yönü henüz seçilmemiş ise park katındaki RIS4 kontakları hariç yön seçme devresindeki tüm kontaklar kapatılır.Dolayısıyla bu butonlardan birine basıldığında, otopark katının üst katında bulunan katlardan gelen çağrı sinyalleri RUN röle bobinine bağlanır ve otoparkın altındaki katlardan gelen çağrı sinyalleri RUV rölesini içerir. Yön seçildikten sonra, RUV veya LVL rölesi ile aynı anda, ters yön engelleme rölelerinden biri RBV veya RBN açılır ve bu, kontaklarıyla geçici olmayan çağrı sinyallerinin kesit devresi aracılığıyla çıkışı keser.
Şek. 2, a, yolcuları indirmek için, kabin durmadan konuşmanın en üst katına çıkar ve ardından geçiş duraklarıyla alçalır ve şemada gösterilen şemada şek. 2, b, yolcu alınması gerekiyorsa kabin, çağrının en alt katına gider, ardından geçiş duraklarıyla yükselir.
Ele alınan şemalarda, seçiciler röle elemanları üzerinde yapılır. Bununla birlikte başka seçiciler de kullanılır: kam, fotoelektrik, sürekli fırça izleme, adımlama, statik elemanlarda vb.
Büyük yolcu akışlarında, konforu artırmak ve gücü iyileştirmek için kontrolü çiftler veya gruplar halinde birleştiren birkaç asansör bir koridora kurulur. Gruplara bağlı asansörlerin sayısı genellikle dördü geçmez, ancak daha sıklıkla üçü geçer, ancak bir grupta sekize kadar asansör içeren sistemler bilinmektedir.
Grup kontrolünde, asansörün çalışmasının genellikle üç ana modu vardır: zirveye çıkma, zirveye inme ve her iki yönde dengeli hareket. Asansörlerin bir veya başka bir mod için etkinleştirilmesi, sevk görevlisi tarafından veya her asansör grubu için kurulan programlama saati aracılığıyla otomatik olarak gerçekleştirilir.
Yüksek katlı binalarda her grup asansör katların belirli bir alanına hizmet verecek şekilde sabitlenir, diğer katlara hizmet vermez. Grupta bir alana veya az katlı bir binaya hizmet veren birden fazla asansör varsa, durak sayısını azaltarak ortalama hareket hızını artırmak için çift ve tek katlara hizmet verecek ayrı asansörler tahsis edilebilir.
Asansörlerin ikili veya grup kontrolünü gerçekleştirmek için, kontrol devreleri toplu olmalı ve her kata her iki yönde yapılan çağrılar, röleler, transistörler vb. içeren uygun depolama cihazları tarafından her yönde ayrı ayrı kaydedilmelidir.
Birinci asansörün (1PC) ve ikinci asansörün (2PC) ilave park rölelerine sahip asansörlerin eşleştirilmiş kontrolünde çalışma özelliklerini yansıtan bir örnek olarak, Şekil 2'de gösterilen şematik diyagramın bir parçasını ele alalım. 3.
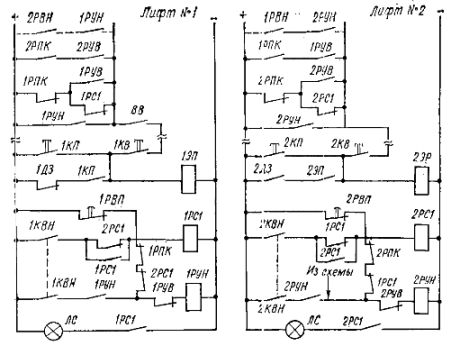
Pirinç. 3. Eşleştirilmiş asansör kontrolünün şematik diyagramının parçası: ER — kat rölesi, RPK — kanal değiştirme rölesi, RVP otomatik başlatma rölesi
Bu durumda birinci katta yolcu ile birlikte inen otomobil diğer katlardan gelen çağrılara cevap vermeyerek yolcuları beklemektedir. Eğer 1. katta araba yoksa sıra ile yükselen ve bırakılan araba otomatik olarak 1. kata gönderilir ve başka bir araba indirildiğinde veya park edildiğinde sonuncusu uçuş bitiminde yerde kalır. veya yükleme merkezine gider ve esas olarak batma yönünde çağrı işlemi için kullanılır.
Birinci kat kabin park rölesi 1PC1 veya 2PC1, birinci kat kabininin 1KVN veya 2KVN limit anahtarından (kopyalayıcı madenlerine takılı) gelmesinden sonra açılır. Bu röleler bloke edilir.Bu nedenle, bunlardan birinin dahil edilmesi, bu arabanın birinci kata diğerinden daha önce geldiğini gösterir. Bu durumda, kapama kontağı ile 1PC1 veya 2PC1 rölesi LS sinyal lambasını yakar ve açma kontağı ile asansörün zil devresini keserek, kabin birinci katta park halindeyken aramayı keser.
Kabin birinci kattan ayrıldığında LS sinyal lambası söner, kabin serbest bırakıldıktan hemen sonra bu asansörün çağrılan devrelerine güç verilir ve başka bir asansörün kabini birinci kata geldikten sonra bilgisayar rölesi çekilir. açık. Bu kabin zemin katta kalır ve yolcuları bekler (LS uyarı lambasının yanmasıyla belirtilir). Düzene giren kabin serbest bırakıldığında ve çağrı olmadığında, 1KVN veya 2KVN limit anahtarının açma kontakları aracılığıyla 1RUN veya 2RUV 1RUN veya 2RUV röle bobinlerini açan devreye bir sinyal gönderilir ve kabin birinci kata gider ve t .n.
Tipik tekli, çiftli ve grup kontrollü asansörlerin motor kontrol ekipmanları genellikle makine dairelerinde kurulan tipik panolarda, istasyonlarda veya kontrol ünitelerinde bulunur.