Hızın bir fonksiyonu olarak motor kontrol devreleri
 Motor kontrolünde, hız değiştikçe karşılık gelen kontrol elemanlarını etkilemek için motor rotor hızının bir fonksiyonu olarak hız izlenir.
Motor kontrolünde, hız değiştikçe karşılık gelen kontrol elemanlarını etkilemek için motor rotor hızının bir fonksiyonu olarak hız izlenir.
Motor yol verme kontrol devrelerinde hız kontrol röleleri veya küçük ölçülü elektrik jeneratörleri kullanılabilir. Ancak, tasarımın karmaşıklığı, yüksek maliyet ve yetersiz güvenilirlik nedeniyle bu amaçlar için son derece nadiren kullanılırlar. Bu nedenle, motor devri dolaylı yöntemlerle kontrol edilir. Asenkron ve senkron motorlarda dönme frekansı, rotor akımının emf'si ve frekansı tarafından, doğru akım motorlarında ise armatür emk'si tarafından kontrol edilir.
İncirde. Şekil 1, a ve b, dönme frekansına ve başlatma anından itibaren EMF'ye ve armatür voltajına bağlı olarak paralel uyarmalı bir DC motorun otomatik olarak çalıştırılması için şemaları göstermektedir. Dönme frekansının kontrolü, dönme frekansıyla orantılı olarak değişen motorun EMF'si ölçülerek gerçekleştirilir.
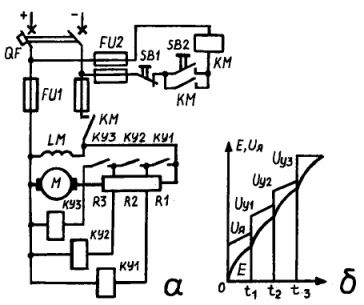
Pirinç. 1.Hızın bir fonksiyonu olarak kontrol devreleri: a ve b - paralel uyarmalı bir DC motorun devresi ve başlatma şeması
EMF, motor devri ile orantılı olduğundan, marş reostasının ayrı aşamalarının otomatik girişi, her biri belirli bir geri çekilmeye ayarlanmış olan KM1, KM2 ve KMZ hızlandırıcı kontaktörlerin çalıştırma voltajının belirli bir büyüklüğünde gerçekleştirilir. değer. marşa basarak düğmeler SB2, KM hat kontaktörünü açar. Tüm dirençler R1, R2, R3, armatür sargısı ile seri bağlanacak ve akımı sınırlayacaktır.
Belirli bir n1 hızında, K1 kontaktörünün bobininin gerilimi Uy1

burada Bu, makinenin katsayısıdır.
Uy1 çekme gerilimine eşit olduğunda, KM1 kontaktörü çalışacak ve R1 direncini kısa devre yapacaktır. n2 ve n3'ün dönüşüne kadar dönme hızında daha fazla artış, K2 kontaktörlerinin bobinlerindeki voltajın artmasına ve değerlerde kısa devreye yol açacaktır.


Bu durumda K2 kontaktörleri ve kısa devre seri olarak çalışacak ve R2 ve R3 dirençlerini kısa devre yapacaktır. R3 direnci kısa devre edildikten sonra yol alma işlemi tamamlanır ve motor uzun süre çalışabilir.
Asenkron motorun rotor devresindeki EMF, kayma ile orantılıdır, yani E2s = E2s. Burada E2 sabit bir rotorun emf'sidir.
Kayma ne kadar düşük olursa, EMF o kadar düşük, yani motor rotor hızı o kadar yüksek olur. Rotor sargılı AC motorların çalıştırılmasını kontrol etmek için, rotor devresindeki EMF değerini kontrol eden röleler kullanılır.Kısa devre yapan ilgili cihazların (röleler, kontaktörler) yol verme dirençleri bu gerilimlere göre ayarlanır.
Sargı rotorlu asenkron motorların ve senkron motorların kontrolü için, hızın bir fonksiyonu olarak frekans yöntemi de kullanılabilir. Bu yöntem, rotor akımı f2 frekansının stator alanı n0 ve rotor n2'nin dönme frekansı üzerindeki bilinen bağımlılığına dayanmaktadır, yani.
Her rotor hızı belirli bir f2 değerine karşılık geldiğinden, o frekansa ayarlanmış ve motor rotor devresine bağlı bir röle kontaktör bobin devresine etki edecektir. Kontaktör, direnç aşamalarını belirli bir hızda kısa devre yapacaktır.
Zıt motorlar tarafından frenleme hıza bağlı olarak yapılır. hız kontrol rölesi SR. Şekil 2'de, a, b, asenkron motorların zıt yönde durdurulmasına ilişkin örnekleri göstermektedir.
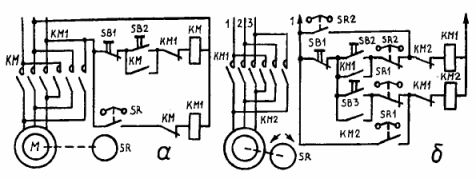
Pirinç. 2. Asenkron motorları karşı koyma yoluyla durdurma şemaları: a — geri alınamaz; b - tersine çevrilebilir
Bu şemaların nasıl çalıştığına bir göz atalım.
SB2 düğmesine basmak, güç kontaklarını kapatan ve SB2 düğmesini bloke eden kontaktör KM'nin bobinini açar (bkz. Şekil 2, a). Aynı zamanda, fren kontaktörü KM1'in bobin devresindeki KM açma bloğunun kontağı ve hız kontrol rölesi SR, bunları ağdan ayırır. Motor rotoru belli bir hıza ulaştığında SR kontağı kapanacak fakat bu artık KM1 kontaktörünün çalışmasına neden olmayacaktır. Motor normal şekilde çalışmaya devam eder.
Motorun karşı anahtarlama freni ile durdurulması SB düğmesine basılarak yapılır.Aynı zamanda, kontaktör KM'nin bobini nötralize edilir ve ana kontakları kaybolur ve motorun ağ bağlantısını keser. KM1'in fren kontaktör devresindeki KM açma kontağı kapanacaktır. Bu anda hız kontrol rölesi SR'nin kontağı kapalı olduğundan, fren kontaktörünün ana kontakları hemen açılır ve stator sargısı tersine çevrilir, manyetik alan ters yönde dönmeye başlar, yani. rotor ve motorun dönüşü sayaç anahtarlaması ile durdurulacaktır. Rotorun hızı düşer ve belirli bir küçük değerde RKS hız kontrol rölesinin kontakları açılır ve motoru şebekeden ayırır.
Ters frenleme ile ters kontrol durumunda (Şekil 2, b), motor, KM1 kontaktör bobininin devresini kapatarak motorun bağlı olmasını sağlayan SB1 düğmesine basılarak ileri çalıştırılır. ağ. Motor rotoru dönmeye başlayacak ve belli bir hıza ulaştığında hız kontrol rölesinin kapama kontağı SR1 kapanacak ve açma kontağı SR2 açılacaktır.
KM2 kontaktörünün bobininin açılması, KM1 kontaktörünün açma kontağı devresini kestiği için gerçekleşmeyecek. Bu konumda motor SB butonuna basılana kadar çalışmaya devam edecektir. SB butonuna basıldığında KM1 bobininin devresi kapatılır. Bu, KM1 kesme kontağını kapatacak ve KM2 kontaktörünün bobin devresine güç verilecektir.
Motor stator sargısı geri vitese geçecektir. Rotor ataletle aynı yönde dönmeye devam ederken, karşıt frenleme gerçekleşir.Hız belirli bir küçük değere düştüğünde, hız kontrol rölesi SR1 kontağını açar, KM2 kontaktörü kapanır ve motorun ağ bağlantısını keser.
Motoru geri viteste çalıştırmak için SB2 düğmesine basın. Tüm süreç tarif edilene benzer olacaktır. Şimdi fren kontaktörünün rolü KM1 kontaktörü tarafından oynanır ve hız kontrol rölesinin SR2 kontakları frenleme işlemini kontrol eder.
Bir senkron motorun otomatik olarak çalıştırılması, iyi bilinen zorluklarla ilişkilidir, çünkü bu durumda sadece başlatma akımını sınırlamak değil, aynı zamanda makineyi ağ ile senkronize etmek de gereklidir.
Düşük güçlü bir senkron motor için kontrol devresi, Şekil 1'de gösterilmektedir. 3. Kalkış akımı sınırlaması, stator sargısında bulunan aktif dirençler tarafından sağlanır. Motoru çalıştırmadan önce, maksimum ve termik koruma sağlayan AC ve DC şebekesinin QF ve QF1 otomatik giriş anahtarlarını açın. Başlatma düğmesine SB2 basıldığında, KM kontaktörünün bobini açılır ve senkron motorun KM'nin ana kontakları aracılığıyla stator sargısı, başlatma dirençleri Rn aracılığıyla ağa bağlanır. Bobin kendiliğinden kilitlenir ve DC devresindeki kontağı, kapanma kontağı K1 ve K2 kontaktörlerinin bobinlerini açmaya hazırlayan kilitleme rölesi KV'yi içerir.
LM rotorunun uyarma devresindeki frekans röleleri KF1 ve KF2 motor devrine bağlı olarak çalışır.Başlangıçta rotor kayması en büyük olduğunda KF1 ve KF2 rölelerinin kesme kontakları açılır.Bobinlerin açılması, KV engelleme rölesi açılmadan önce gerçekleşir ve K1 bobini güç almayacaktır. KF1 ve KF2 röle kontakları, röle düzenlemesine göre senkron olarak motor devri yaklaşık %60-95'e ulaştığında tekrar kapanacaktır.
KF1 rölesinin kontaklarını kapattıktan sonra, K1 kontaktörünün bobini açılacak, ana devredeki kontakları Rp başlangıç dirençlerini kısa devre yapacak ve stator tam hat voltajına dönecektir. KF2 rölesinin açık kontakları kapatıldığında, K1 kontaktöründen bağımsız olarak K2 kontaktörünün bobinini beslemek için bir devre oluşturulur, kontağı senkron hızın yaklaşık %60'ı hızında açılır.
Kontaktör K2'nin iki sargısı vardır: bir ana, KM1'i çeken ve ikinci sargı KM2, kontaktörle sağlanan kilidi serbest bırakmak için tasarlanmıştır. Alma bobini KM1'i açtıktan sonra, uyarma devresinde K2 kapama kontakları kapanır ve K2 açma kontakları açılır, rotor sargısını R1 ve R2 deşarj dirençlerinden ayırır ve rotoru DC şebekesine bağlar.
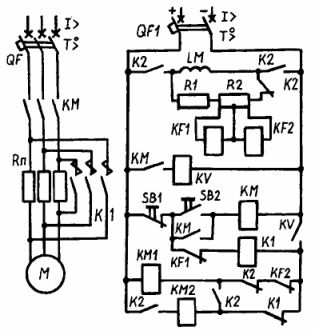
Pirinç. 3. Senkron motor kontrol şeması
K2 kontaktörünün kontakları aşağıdaki sırayla çalışır. Başlatma bobininin besleme devresinde N / O kontağı K2 açılır, ancak bloke etme eylemi kontaktörü enerjili tutar. Kapatma kontakları K2, iki bobinin besleme devresinde ve KM2 bobininin devresinde kapanarak devreyi müteakip açmaya hazırlar. Kilitleme mekanizması bobin KM2'den serbest bırakılır bırakılmaz bobin K2'nin enerjisi kesilecektir. SB1 düğmesine basılarak motorun şebekeden bağlantısı kesilir.Bobin K1, mandalı serbest bırakan ve bobin KM1'i kapatan bobin KM2 devresindeki açma kontağını serbest bırakır, ardından devre orijinal konumuna döner.