Mekanizmaların çalışmasının bir zamanlama diyagramı ve bir blok diyagramının hazırlanmasına bir örnek
Teknolojik hatların kontrol şemalarında, çıkış elemanlarının durumu, yani. aktüatörler (elektromanyetik röleler, manyetik başlatıcılar, katı hal röleleri vb.), yalnızca giriş veya alıcı elemanların (düğmeler, sensörler vb.)
Tasarlanan teknolojik sürecin sözlü bir açıklaması, teknolojik sürecin zaman diyagramı olarak adlandırılan giriş ve çıkış sinyallerindeki değişim çizelgesi şeklinde sunulabilir.

Bir zamanlama şeması oluşturma örneği, tahıl ön temizleme çizgi şemasına dayalı olarak yapılacaktır.
Devre çalışmasının açıklaması
SA1 anahtarı kullanılarak çalışma modu seçilir: otomatik - ana çalışma modu, manuel - devreye alma modu.
Devreye alma modu, tüm kontrol mantığını atlayarak, SB4-SB6 kilitleme düğmeleri aracılığıyla lineer mekanizmaların manyetik yol vericilerinin bobinlerine güç sağlamaktan oluşur. Bu modda, operatörün kendisi hattın uzunluğuna veya ayrı bir mekanizmaya karar verir, haznenin dolum kontrolü sadece görsel olarak gerçekleştirilir.
Kural olarak, bu çalışma modu, acil durum çalışma modlarında, kontrol mantığı bozulduğunda ve hattaki ürünü kaybetmeden teknolojik süreci tamamlamak gerektiğinde veya bazı mekanizmaların onarımından sonra devreye alma sırasında kullanılır. hatta, tüm lineer mekanizmaları değil, sadece onu başlatmak gerekir.
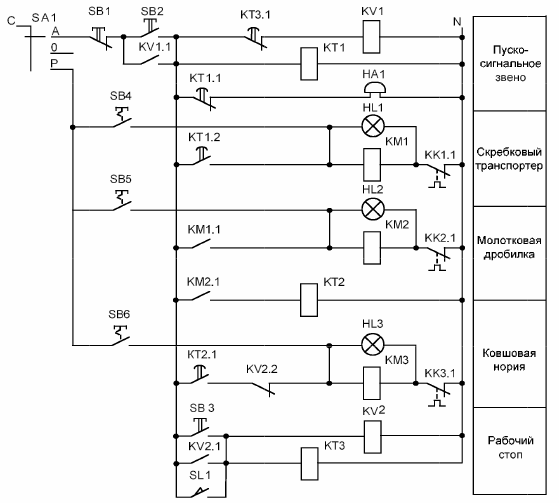
Pirinç. 1. Tahıl ön temizleme hattının röle kontağı kontrol devresi
Çalışma modu anahtarından sonra, kontrol devresine, bir zaman gecikmesiyle aynı anda zili kapatmaya ve sıyırıcı konveyörü açmaya izin veren bir başlatma sinyal bloğu dahil edilir. Röle kontak devrelerini oluştururken, mekanizmaları açma veya kapatma sırası, manyetik yol vericilerin kapatma kontakları vasıtasıyla gerçekleştirilir.
Dolayısıyla bizim durumumuzda, sırasıyla KM1.1 kontağı aracılığıyla manyetik yol verici KM1'in (kazıyıcı konveyör) bobininde enerji varsa, güç aynı zamanda manyetik yol verici KM2'nin (çekiç) bobininde de olacaktır.
Aynı zamanda, hattın tüm mekanizmalarını başlatmak pratik değildir, çünkü çalışma sırasında, hattın iki mekanizmasının elektrikli tahrikleri henüz nominal çalışma moduna ulaşmadığında böyle bir çalışma modu meydana gelebilir ve ürün ana mekanizma yoluyla kendilerine iletilir ve bu da hattın acil olarak durdurulmasına neden olur. Bu nedenle, kontrol devresinde, zaman rölesi KT2 tarafından gerçekleştirilen bir zaman gecikmesi ile ana mekanizmanın manyetik başlatıcısı KM3'ün bobinine güç sağlanır.
Doğrusal mekanizmalar devreye giriyor, çalışma devam ediyor. Bazen çalışma sırasında haznenin henüz dolmadığı ve hattın kapatılması gereken bir an gelir. Bu durumda, kontrol şemasında, hattın tüm mekanizmalarını doğru sırayla (ürünün hat boyunca hareketi yönünde) kapatmayı mümkün kılan bir "iş durdurma" bloğu kullanılır.
Böylece, SB3 düğmesine basıldığında, KV2.2'nin açma kontağı KM3 bobini ile devreyi kestiği ara röle KV2 açılır, hat başı mekanizması kapanır. Aynı zamanda zaman rölesi KT3, üründen mekanizmaları temizlemek için hattın çalışma süresi hakkında bir rapor hazırlar.
Belirli bir süre sonra, KT3.1 zaman rölesinin kontağı, kontağı başlatma düğmesini atlayan ara röle KV1 ile devreyi keser. Bu, tüm kontrol devresinin durmasına ve sonuç olarak lineer mekanizmaların durmasına neden olur. SL1 hunisindeki seviye sensörünü tetiklerken kontrol devresinin çalışması için benzer bir algoritma.
Sunulan kontrol şemasında doğrusal elektrik motorlarının aşırı yükten korunması, sırasıyla manyetik yol vericiler KM1 .. .KM3.
Kontrol devresindeki doğrusal mekanizmaların çalışmasının görsel kontrolü için HL1 ... HL3 gösterge lambaları vardır. Doğrusal mekanizmaların normal çalışmasında gösterge lambaları yanacaktır. Acil bir kapatma durumunda, manyetik marşlı devredeki güç kesilir ve gösterge lambası buna göre söner.
Elektrikli ana otomatik çalışma modunun şemasına göre, tahıl ön temizleme hattı için 3 düğme gereklidir: SB1 «Durdur», SB2 «Başlat» ve SB3 «İşi durdur» ve ayrıca bir seviye sensörü SL1. Böylece 4 giriş elemanımız var. Ayrıca, düğmeler kendi kendine dönüş ile kabul edilir, yani. güç açık durumunu düzeltmeden.
Zaman çizelgesi oluşturmaya bir örnek
Çıktı öğeleri 4: çan HA1, sıyırıcı konveyör KM1, çekiçli kırıcı KM2 ve kovalı elevatör KM3.
SB2 «Başlat» düğmesine basıldığında, personeli proses hattının başlamak üzere olduğu konusunda uyarmak için ilk tetikleme bağlantısı (zil HA1) 10 saniye süreyle etkinleştirilmelidir.
HA1'in zili çaldıktan sonra, yani. "Başlat" düğmesine SB2 86 basıldıktan 10 saniye sonra sıyırıcı konveyör KM1 ve darbeli kırıcı KM2 açılır (bkz. Şekil 2).
Mekanizmaların çalışma süreleri verimliliklerine ve üretim hacimlerine göre belirlenir.Sıyırıcı konveyör, çekiçli kırıcı ve kovalı elevatörün verimliliği sırasıyla 5 t/h, 3 t/h ve 2 t/h'dir.Tane hacmi belirlenir besleme hunisinin hacmine ve 1 m3 başına bir kilogram tahıla dayalı olarak.
Farklı mahsullerin tahılları farklı bir şekle, yoğunluğa ve karşılık gelen ağırlığa sahiptir, bu nedenle her bir tahıl türünün bir metreküpü aynı ağırlıkta olamaz.
Bunker hacmini 5 m alalım Yüklenen tahıl 560 - 660 kg ağırlığındaki karabuğdaydır. Geri dönüşüm kutusunun başlangıç durumu boştur. Daha sonra dolu bir kaptaki tahıl miktarı: N = 580 x 5 = 2900 kg.
Kovalı elevatör, tüm mekanizmalar arasında en düşük üretkenliğe sahiptir; ayrıca hatta tahıl tedarik ediyor. Çalışma süresi: Tm3 = 2000/2900 = 0,689 saat = 41 dakika olacaktır.
Kalan mekanizmaların çalışma süresi 41 dakikadan fazla olacak ve devrenin mantığına göre belirleniyor.
Sıyırıcı konveyör KM1 ve darbeli kırıcı KM2 çalıştırıldıktan sonra hızlanmaları için süre tanınmalıdır. Tüm mekanizmalar için hızlanma süresi alınır - 10 saniye. Çekiçli kırıcı KM2 ve sıyırıcı konveyör KM1 üzerinde bir ürün blokajı oluşturmamak için kova kaldırıcı KM3 en son (KM1 ve KM2 başlatıldıktan 10 saniye sonra) çalıştırılır. 41 dakika sonra, hazneyi doldurmak için gereken tüm ürün KM3 kovalı elevatörden geçecektir.
SL seviye sensörü, ürün artıkları KM2 çekiçli kırıcıdan KM1 sıyırıcı konveyörden geçmeden önce hazne doldurma sinyali alınacak şekilde monte edilir.
SL1 seviye sensörü çalıştırıldığında, KM3 ana mekanizması kapatılır (SB2 «Başlat» düğmesine basıldıktan 41 dakika 20 saniye sonra). Bir zaman gecikmesiyle, KM1 ve KM2 aynı anda kapanır. Bu zaman gecikmesi 20 saniyeye eşit kabul edilebilir.
Normal çalışma için zamanlama şeması Şekil 2'de gösterilmiştir.
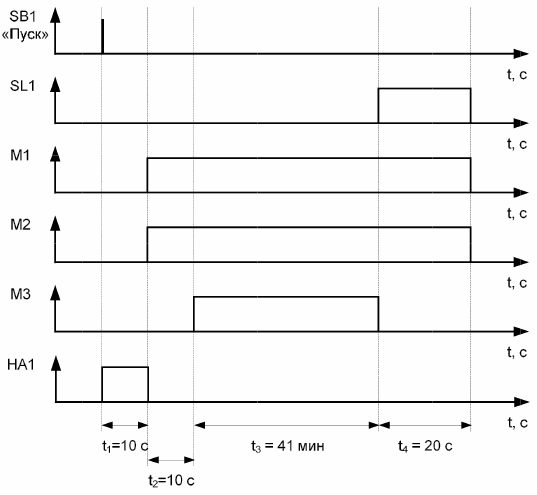
Pirinç. 2. Normal çalışma için zamanlama şeması
«Çalışma durdurma» modunda operatör, seviye sensörü SL1'i tetiklemeden önce işlemi durdurabilir, bu nedenle bu durumda mekanizmaların çalışma zamanını belirlemek imkansızdır. «Genel durdurma» modunda, tüm mekanizmalar hemen devre dışı bırakılır.
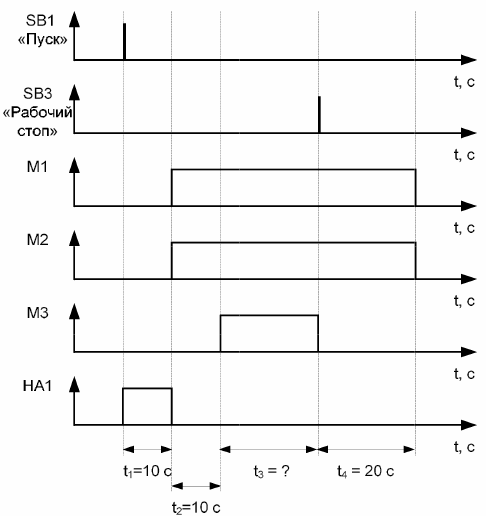
Pirinç. 3. «Çalışma durdurma» çalışma modu için zamanlama şeması
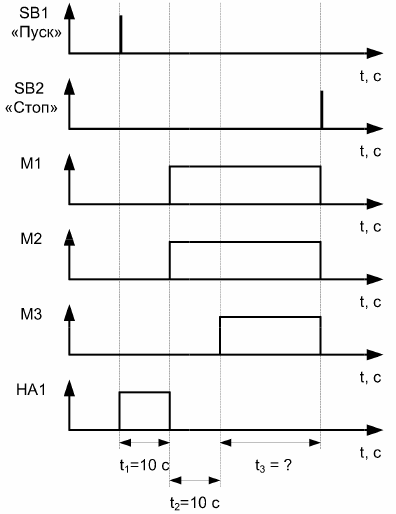
Pirinç. 4. «Toplam durma» modu için zamanlama şeması
Mekanizmaların işleyişine ilişkin bir blok diyagram oluşturma örneği
Teknolojik sürecin blok şeması, çalışmasının algoritmasını açıkça göstermelidir, bunun için belirli eylemlerin özel tanımları kullanılır.
Şekil 5, bir tahıl ön temizleme hattı için örnek bir blok diyagramı göstermektedir. Sunulan blok diyagram, teknolojik sürecin işleyişi için tüm olası seçenekleri göstermektedir. "Kaza" durumu, "Başlat" düğmesine SB2 basıldıktan sonra tahıl ön temizleme hattının çalışması sırasında herhangi bir zamanda meydana gelebilir.
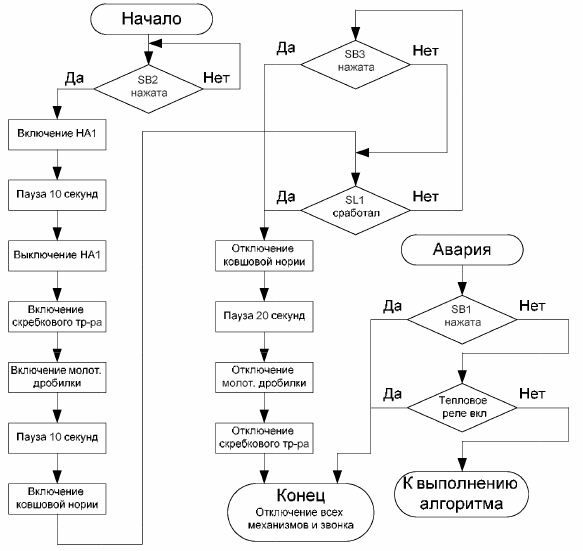
Pirinç. 5. Tahıl ön temizleme hattının blok diyagramı