Kontrol şemaları tasarlamak için sezgisel bir yöntem
 Sezgisel yöntem - çeşitli tasarım organizasyonlarında çeşitli mekanizmaların otomasyonunda kazanılan deneyime dayalı olarak kontrol şemaları geliştirme yöntemi. Tasarımcının mühendislik sezgisine dayanır.
Sezgisel yöntem - çeşitli tasarım organizasyonlarında çeşitli mekanizmaların otomasyonunda kazanılan deneyime dayalı olarak kontrol şemaları geliştirme yöntemi. Tasarımcının mühendislik sezgisine dayanır.
Yalnızca önceki tüm deneyimleri özümsemiş ve şema çizme konusunda belirli yeteneklere sahip, soyut düşünebilen ve mantıksal olarak akıl yürütebilen biri bu yöntemde mükemmel bir şekilde ustalaşabilir. Karmaşıklığına rağmen, çoğu elektrik tasarımcısı sezgisel yöntemi kapsamlı bir şekilde kullanır.
Örneğin, bir itme kolunun basitleştirilmiş bir kinematik diyagramını ele alalım (Şekil 1). Tekerlek (5) saat yönünde döndüğünde, kol (4) kolu (1) O ekseni etrafında döndürür, böylece pabucu (3) kol (2) ile birlikte çevirmeye zorlar. Tekerleğin 5 daha fazla dönmesiyle, kolun 1 hareket yönü değişir ve pabuç orijinal konumuna geri döner, bundan sonra motor durmalıdır.
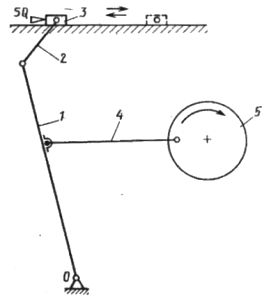
Pirinç. 1. Kol itici kontrolünün şematik diyagramı
Ele alınan mekanizma, bir itme cihazının tipik bir temsilcisidir.İlk döngüde mekanizma çalışır durumdadır. İkinci ölçüde işe yaramıyor. Mekanizmanın çalışmadığı döngüye sıfır denir. Pabuç tamamen ileri geri hareket etmesine rağmen (ileri ve geri), tahrik için geri dönüşü olmayan bir elektrik motoru kullanılabilir.
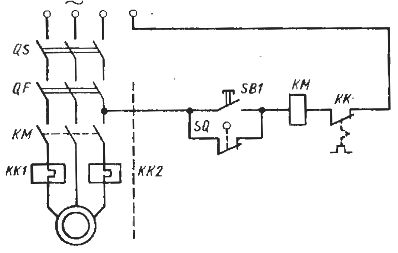
Kol pistonlu elektrik motorunun kontrol devresi iki bölümden oluşur (Şekil 1'de bunlar noktalı bir çizgi ile ayrılmıştır): güç devresi ve kontrol devresi.
Güç devresinin elemanlarının amacını düşünün. Manyetik yolvericide onarım veya hasar olması durumunda elektrik motorunun güç kaynağını kesen QS anahtarına üç fazlı akım verilir. Daha sonra akım, şemada QF salımı gösterilen devre kesiciden akar. Kısa devre akımları durumunda sürücüye giden güç kaynağını korumak ve bağlantısını kesmek için tasarlanmıştır. Manyetik yol verici KM'nin ana kontakları, elektrik motorunun M sargısını açar veya kapatır.
Isıtma elemanları güç devrelerinde gösterilen termik röleler KK1 ve KK2, elektrik motorunu uzun süreli aşırı yüklenmelerden korumak için tasarlanmıştır:
Kontrol şeması aşağıdaki gibi çalışır. Başlatma düğmesine SB1 bastığınızda, manyetik başlatıcı KM'nin bobinine enerji verilir ve bu nedenle KM besleme devresinin kontakları kapanır ve motor sargısına elektrik akımı girer. Motor rotoru döndürülür ve tambur ileri doğru hareket etmeye başlar. Aynı zamanda SQ limit anahtarının kolundan uzaklaşır ve kontakları kapanır.
Başlatma düğmesi SB1 serbest bırakıldığında ve kontakları açıldığında, manyetik başlatıcının KM bobini SQ limit anahtarının kontakları üzerinden güç alacaktır.İleri ve sonra geri hareket ettikten sonra, piston SQ limit anahtarının koluna basacak, kontakları açılacak ve KM bobini kapanacaktır. Bu, güç devresindeki KM kontaklarının elektrik motorunu açıp durdurmasına neden olacaktır.
Ele alınan devre, güç ve kontrol devrelerini içerir. Gelecekte, sadece kontrol şemaları dikkate alınacaktır.
İşleve göre, yani amaca göre, devrenin çalışmasına dahil olan tüm elemanlar üç gruba ayrılabilir: kontrol kontakları, ara elemanlar ve yürütme elemanları.
Kontrol kontakları, komutların verildiği öğelerdir (kontrol düğmeleri, anahtarlar, limit anahtarları, birincil dönüştürücüler, röle kontakları vb.).
Ara elemanların adı, kontrol ve yürütme unsurları arasında bir ara pozisyon işgal ettiklerini gösterir. Röle-kontak devrelerinde, zaman rölelerini ve ara röleleri içerirler ve temassız devrelerde — mantık kapıları.
Yürütme öğeleri yürütme mekanizmalarıdır. Bununla birlikte, kontrol devreleri geliştirilirken, tahrik mekanizmalarının kendileri (elektrik motorları veya ısıtma elemanları) kullanılmaz, ancak bunları içeren cihazlar, yani. manyetik başlatıcılar, kontaktörler vb.
Tüm kontrol kontakları, işlevsel ilkelerine göre beş türe ayrılır: kısa etkili kontak başlat (PC), uzun etkili kontak başlat (PD), kısa etkili kontak durdur (OK), uzun etkili kontak durdur (OD ), start-stop kontağı (yazılım). Bu kişilere ana kişiler denir.
Döngüsel mekanizmaların kontrolünde tüm tipik temasların çalışmasının siklogramları, Şek. 2.
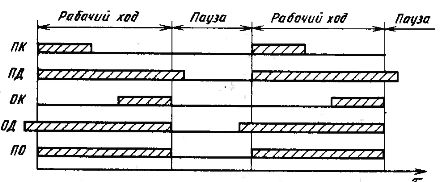
Pirinç. 2.Kontrol kontaklarının siklogramı
Beş kontağın her biri belirli anlarda çalışmaya başlar (kapanır) ve biter (açılır). Böylece, başlatma kontakları, çalışma vuruşunun başlangıcı ile birlikte çalışmaya başlar, ancak YAK kontağı, çalışma vuruşu sırasında çalışmayı durdurur, OD - duraklama sırasında, yani, birbirlerinden yalnızca kapanma anlarında farklılık gösterirler ( açılış) .
Başlatma kontaklarının aksine, çalışma vuruşunun sonu ile aynı anda çalışmayı durduran durdurma kontakları, dahil etme (kapama) anlarında farklılık gösterir. Tamam durdurma kontağı, çalışma vuruşu sırasında ve OD kontağı - duraklama sırasında çalışmaya başlar. Sadece yazılımın kontağı, çalışma rotasının başlangıcı ile birlikte çalışmaya başlar ve bitişi ile sona erer.
Ele alınan beş ana temasın yardımıyla, tipik şemalar olarak adlandırılan yürütme ve ara unsurları kontrol etmek için dört şema elde etmek mümkündür (Şekil 3).

Pirinç. 3. Yürütme ve ara devreler için tipik kontrol şemaları
İlk tipik devre (Şekil 3, a) yalnızca bir yazılım kontrol kontağına sahiptir. Kapalıysa X aktüatöründen elektrik akımı akar ve açıksa akım akmaz. PO kontağının kendi anlamı vardır ve diğer tüm kontaklar çift olarak kullanılmalıdır (başlat ve durdur).
İkinci tipik devrede sürekli etkili iki kontrol kontağı vardır: PD ve OD (Şekil 3, b).
Üçüncü tipik devre, bilgisayarın başlatma kontağından ve OD durdurma kontağından oluşur, kontrol kontaklarına ek olarak, bu devre, X aktüatörünün başlatma kontağından sonra güç almaya devam edeceği bir engelleme kontağı x içermelidir. bilgisayar açılır (Şekil 3, c).
Dördüncü tipik şema, iki kısa süreli kontağa dayanır: paralel bağlı bir bilgisayarı başlatın ve Tamam'ı durdurun (Şekil 3, d).
Verilen dört tipik şema, kontakları kontrol etmek için (küplerdenmiş gibi) karmaşık paralel seri şemalar oluşturmaya izin verir. Bu nedenle, örneğin, incelenmekte olan kol kontrol şeması (bkz. Şekil 1), dördüncü tipik şemaya dayanmaktadır. Kısa süreli başlatma kontağı olarak SB1 butonlarını ve kısa süreli durdurma kontağı olarak SQ limit anahtarını kullanır.
Sezgisel bir yöntem kullanarak bir kontrol şeması hazırlarken, kontrol kontağının türünü, yani eyleminin süresini doğru bir şekilde belirlemek gerekir.
Tipik şemaları kullanarak sezgisel bir yöntem kullanarak bir kontrol şeması geliştirme örneğini ele alalım.
Bir indüktörü kontrol etmek için yarı otomatik bir cihaz ve bir ürünü yüksek frekanslı akımlarla ısıtmak ve ardından su jetleri ile soğutmak için tasarlanmış bir tesisatı püskürtmek için bir cihaz geliştirmek gerekli olsun. Ürünün indüktörde ısınma süresi 12 sn ve soğuma süresi 8 saattir.Ürün indüktöre manuel olarak monte edilir.
İlk olarak, yarı otomatik cihazın çalışmasını analiz edeceğiz ve tüm yönetici ve ara unsurları belirleyeceğiz. Çalışan, ürünü indüktöre manuel olarak kurar ve başlat düğmesine basar.Bu noktada indüktör açılır ve ürünün ısınması başlar. Aynı zamanda, ısıtma süresi (12 s) dikkate alınarak zaman rölesi de açılmalıdır.
Bu zaman rölesi (daha doğrusu kontakları) indüktörü kapatır ve soğutma için su sağlayan sprinkleri açar. Aynı zamanda, soğuma süresini geri saymak, yani püskürtücüyü kapatmak için ikinci bir rölenin açılması gerekir. Bu şekilde dört elemanı kontrol etmek gerekir: bir indüktör, bir püskürtme cihazı ve iki zaman rölesi.
İndüktör bir kontaktör aracılığıyla açılıp kapatılır, bu nedenle ikincisini kontrol etmek gerekir. Püskürtücü bir solenoid valf tarafından kontrol edilir.
Sırasıyla KM1 kontaktörünün bobinini (bobini), KM2 solenoid valfinin bobinini ve zaman rölesi KT1 ve K.T2'nin bobinlerini belirleyelim. Böylece iki aktüatörümüz var: KM1 ve KM2 ve iki ara eleman: KT1 ve KT2.
Yapılan analizden, önce ısıtmanın başlaması gerektiği, yani KM1 bobininin uyarılacağı anlaşılmaktadır. SB tetik düğmesi (kısa eylem) başlatma kontağı olarak kullanılır. Bu nedenle, üçüncü veya dördüncü tipik şema uygulanabilir.
İndüktörün, bu durumda uzun etkili kontaklar olan zaman rölesi KT1.1'in kontaklarından ayrılmasına izin verin. Bu nedenle, üçüncü tipik şemayı seçiyoruz. Manyetik yol verici KM1'in sargısı ile eşzamanlı olarak, paralel olarak bağlayarak yapılması çok kolay olan zaman rölesi KT1'i açmak gerekir.
Ortaya çıkan devrenin çalışmasını düşünün (Şekil 4, a).
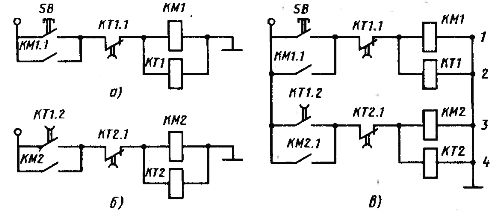
Pirinç. 4.Kontrol devreleri: a — ısıtma süresi için endüktör ve röle, b — sprinkler cihazı ve soğutma süresi rölesi, c — bir bütün olarak kurulum
SB start butonuna bastığınızda KM1 kontaktörünün bobinine enerji verilir yani ürünün ısınması başlar. Aynı zamanda KT1 zaman rölesinin bobini enerjilenir ve ısıtma süresini geri saymaya başlar. Kilitleme kontağı KM1.1'in yardımıyla, KM1 bobininin gerilimi, SB tetik düğmesini bıraktıktan sonra bile korunacaktır, yani. kontaklarını açtıktan sonra.
Isıtma süresi dolduktan sonra KT1 zaman rölesi çalışacak, kontağı KT1.1 açılacaktır. Bu, KM1 bobininin kapanmasına neden olacaktır (ürünün ısınması sona erecektir). Püskürtücü şimdi açılmalıdır. Kontak kapatılarak KT1 zaman rölesi tarafından açılabilir. Püskürtücü açıldığında, KT1 zaman rölesi kapanır. Bu nedenle, KT1.1 kapatma kontağı kısa süreli bir kontak olacaktır. Bu nedenle, üçüncü tipik şemayı tekrar kullanacağız.
Püskürtücü ile eş zamanlı olarak, soğuma süresini geri sayan zaman rölesi KT2'yi açmak gerekir. Bunun için uygulanan tekniği kullanacağız ve zaman rölesi KT2'nin bobinini KM2 bobinine paralel bağlayacağız. Böylece ikinci kontrol şemasını elde ederiz (Şekil 4, b). İki devreyi birleştirerek (Şekil 4, a ve b), genel bir kontrol şeması elde ederiz (Şekil 4, c).
Şimdi devrenin işleyişini bir bütün olarak ele alalım (Şekil 4, c). SB start butonuna bastığınızda KM1 kontaktörünün ve KT1 zaman rölesinin bobinleri enerjilenir ve ürün ısınmaya başlar.12 sn sonra KT1 zaman rölesi çalışacak ve 1. devredeki kontakları açılacak ve 2. devredeki kontakları kapanacaktır. Ürün soğumaya başlayacaktır. Solenoid valfin KM2 bobini ile eş zamanlı olarak, zaman rölesi K'ye soğuma süresini sayarak T2 enerji verilecektir.KT2.1 kontağı (devre 3) açıldığında, valf KM2 ve zaman rölesi KT2 kapatılır ve devre orijinal konumuna geri döner.
Ortaya çıkan indüktör ve sprinkler kontrol şeması, sezgisel bir yöntem kullanılarak geliştirilmiştir. Ancak, bu planın doğru ve optimal olacağına dair bir kanıt yoktur. Devrenin çalışabilirliği sorunu ancak üretimi ve dikkatli deneysel doğrulamasından sonra çözülebilir. Bu kesinlikle sezgisel yöntemin en büyük dezavantajıdır. Analitik yöntemde belirtilen eksiklik yoktur. Kontrol şemaları geliştirmek için analitik yöntem bir sonraki makalede tartışılacaktır.