Konveyör tahrik zincirleri
 Makale, bazı konveyörlerin elektrikli tahrik şemalarını incelemektedir. İncirde. Şekil 1, hızları tamamen aynı olması gereken ayrı konveyör hatlarının elektrikli tahrikinin şematik bir diyagramını göstermektedir. Böyle bir ihtiyaç, sürekli üretimde, farklı ürünlerin, ayrı hatlarda gerekli teknolojik işlemlerden sonra, montaj sahasında birbiriyle tam bir uyum içinde buluşması gerektiğinde ortaya çıkar.
Makale, bazı konveyörlerin elektrikli tahrik şemalarını incelemektedir. İncirde. Şekil 1, hızları tamamen aynı olması gereken ayrı konveyör hatlarının elektrikli tahrikinin şematik bir diyagramını göstermektedir. Böyle bir ihtiyaç, sürekli üretimde, farklı ürünlerin, ayrı hatlarda gerekli teknolojik işlemlerden sonra, montaj sahasında birbiriyle tam bir uyum içinde buluşması gerektiğinde ortaya çıkar.
Şema, birkaç konveyör hattını aynı anda başlatmanıza ve durdurmanıza ve hızlarını ayarlamanıza olanak tanır. Koordineli hareket, ortak bir invertör frekans konvertörü ile senkron şaft şemasına göre motorların anahtarlanmasıyla elde edilir. D1 ve D2 motorlarının hız kontrolü, değişken oranlı dişli kutusu P kullanılarak sürücünün hızı değiştirilerek yapılır.
Konveyörleri başlatma izni, en kritik alanlarda konveyörlerin çalışmasını izleyen operatörler tarafından verilir. G1 ve G2 hazır butonlarına basıldığında LS1 ve LS2 sinyal lambaları yanar ve RG1 ve RG2 röleleri devreye girer. İkincisi, röleyi RP'yi başlatmak için hazırlar.
Başlat düğmesine bastığınızda, L1 kontaktörünü açan RP tetiklenir. Sürücü konumu D1 ve D2'nin tek fazlı senkronizasyonu vardır. Zaman gecikmelerinden sonra, L1 ve L2 kontaktörlerinde bulunan sarkaç röleleri dönüşümlü olarak L2'yi açar, L1'i kapatır ve LZ'yi açar. Frekans dönüştürücü motorunun reostasının başlatılması, zaman prensibine göre gerçekleştirilir (zaman röleleri RU1, RU2, RUZ).
İncirde. Şekil 2, yolcuların iniş ve çıkışları üzerinde çalışmanıza izin veren metro yürüyen merdiveninin elektrikli tahrikinin bir diyagramını göstermektedir. Tahrik motoru olarak, gücü 200 kW'a kadar olan faz rotorlu bir asenkron motor kullanılır. Günün belirli saatlerinde, önemsiz bir yolcu akışı ile yürüyen merdiven uzun süre neredeyse boşta çalışabilir.
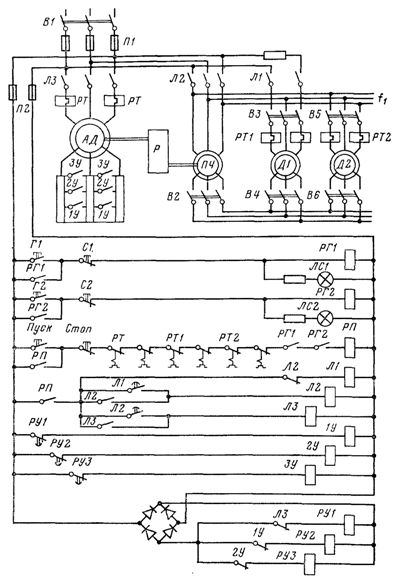
Pirinç. 1. Konveyör hatlarının koordineli hareketle elektrikli tahrik şeması.
Motorun güç faktörünü ve verimini artırmak için, şaft yükü nominalin yaklaşık %40'ına düşürüldüğünde, stator sargısı deltadan yıldıza geçer. Yük arttıkça tekrar üçgene döner.
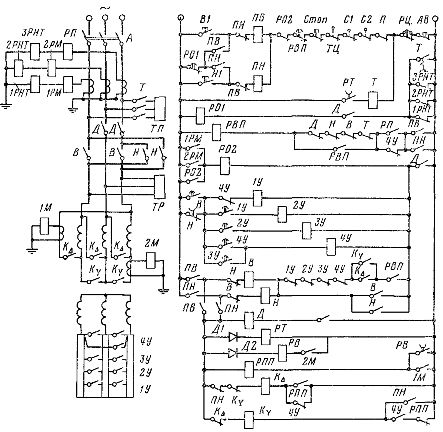
Pirinç. 2. Metro yürüyen merdiveninin elektrikli tahrikinin şeması.
Söz konusu anahtarlama, RPP ve РВ röleleri aracılığıyla k∆ ve kY kontaktörlerini kontrol eden aşırı akım röleleri 1M ve 2M tarafından otomatik olarak yapılır. Açma gecikmeli RV kontağı, 2M kapalı ve 1M açık arasındaki dönemde RPP bobin devresinin varlığını sağlar.
Jeneratörün tam yükte iniş modunda, motor, tırmanış modunda benzer bir yüke kıyasla önemli ölçüde daha az yüklenir (kurulumdaki mekanik kayıplardan dolayı).Bu nedenle sarkma modunda motorun stator sargısı her zaman yıldız bağlantılıdır. Motor, hızlandırıcı kontaktörleri 1U-4U üzerindeki sarkaç röleleri kullanılarak zamanın bir fonksiyonu olarak başlatılır. Durdurma mekaniktir. Bu durumda, dişli ile motor milleri arasındaki mekanik bağlantının kopması durumunda merdivenin durmasını sağlamak için motor miline servis freni TP ve tahrik dişli miline güvenlik TP takılır.
Devre, önceki bölümde açıklanan tipik güvenlik kilitlerini uygular: ekipmanın mekanik kısmının arızalanmasından - zincirlerin ve korkulukların çıkarılması (limit anahtarları TC, P), basamak yapısının ihlali (limit anahtarları C1 ve C2) ), yatakların aşırı sıcaklığı ( termik röle 7), aşırı hızdan (santrifüj hız rölesi RC).
Ek olarak, motor koruması sağlanır: maksimum (röle 1RM, 2RM), aşırı yükten (röle RP), motordan güç kaybından (sıfır akım rölesi 1RNT, 2RNT, 3RNT), güç kontaktörlerinin kapatma kontaklarının kaynağından ( RVP bobin devresinde D, Y, B, T ve B bobin devresinde 1U-4U kontaklarının açılması).
Güç kaybına, yatağın aşırı ısınmasına ve motor aşırı yüklenmesine karşı koruma, zaman rölesi PO1 ve RVP tarafından belirlenen bir zaman gecikmesiyle çalışır. Uzaktan kumanda hız rölesi dışındaki tüm korumalar, motoru şebekeden ayırarak ve TP servis frenini uygulayarak durdurur. Sadece frenleme işleminin sonunda, PT rölesinin gecikmesi sona erdikten sonra, güvenlik freni TP ek olarak çalıştırılır.RC hız rölesi çekildiğinde veya acil durdurma düğmesine basıldığında, her iki fren de aynı anda uygulanır.