Ana vinç mekanizmalarının motorlarındaki statik yükler
Vinç vincinin motor şaftının statik yük kaldırma modundaki gücü ve torku formüllerle hesaplanabilir.
burada P, motor şaft gücüdür, kW; G, yükü kaldırmak için gereken kuvvettir, N; G0 — kavrama cihazının kaldırma kuvveti, N; M, motor mili momentidir, Nm; v, yükü kaldırma hızıdır, m / s; D, çekme vinci tamburunun çapıdır, m; η — kaldırma mekanizmasının etkinliği; i, dişli kutusu ve zincirli vincin dişli oranıdır.
İniş modunda, vinç motoru sürtünme gücü Ptr ile alçalan yükün Pgr ağırlığının etkisinden kaynaklanan güç arasındaki farka eşit güç geliştirir:
Orta ve ağır yükleri indirirken Pgr >> Ptr (fren bırakma) olduğundan enerji dişli milinden motora yönlendirilir. Bu durumda motor şaft gücü, kW, formül ile ifade edilecektir.

Hafif yükleri veya boş bir kancayı indirirken, Pgr < Ptr olduğu durumlar olabilir.Bu durumda, motor bir hareket anı (güç düşüşü) ile çalışır ve güç geliştirir, kW,

Verilen formüllere dayanarak, kanca üzerindeki herhangi bir yükte vinç motorunun gücünü belirlemek mümkündür. Hesaplarken, mekanizmanın verimliliğinin yüküne bağlı olduğu unutulmamalıdır (Şekil 1).
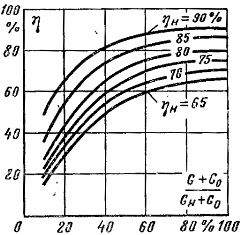
Pirinç. 1. Mekanizmanın veriminin yüke bağlılığı.
Statik çalışma modunda vincin hareketinin yatay mekanizmalarının motorlarının şaftı üzerindeki güç ve tork formüllerle belirlenebilir.

P, vinç hareket mekanizmasının motor mili gücü, kW; M, hareket mekanizmasının motor mili momentidir, Nm; G — taşınan yükün ağırlığı, N; G1 - hareket mekanizmasının kendi ağırlığı, N; v - hareket hızı, m / s; R, tekerleğin yarıçapıdır, m; r, tekerlek aksının boynunun yarıçapıdır, m; μ — kayma sürtünme katsayısı (μ = 0,08-0,12); f — yuvarlanma sürtünme katsayısı, m (f = 0,0005 — 0,001 m); η — hareket mekanizmasının etkinliği; k - tekerlek flanşlarının raylar üzerindeki sürtünmesini hesaba katan katsayı; i - alt takım redüktörünün dişli oranı.
Bazı kaldırma ve taşıma mekanizmalarında hareket yatay yönde gerçekleşmez. Rüzgar yükünün vb. etkisi de mümkündür. Bu durumda gücü belirleme formülü şu şekilde temsil edilebilir:

Ek olarak: α — kılavuzların yatay düzleme eğim açısı; F — belirli rüzgar yükü, N / m2; S, rüzgar basıncının 90 °, m2 açıda etki ettiği alandır.
Son formülde, ilk terim, yatay hareket sırasında sürtünmenin üstesinden gelmek için gereken motor mili gücünü karakterize eder; ikinci terim kaldırma kuvvetine karşılık gelir, üçüncü terim ise rüzgar yükünden gelen güç bileşenidir.
Bir dizi vincin üzerinde çalışma ekipmanının bulunduğu bir döner tablası vardır. Platformun hareketi, üzerine monte edilmiş Dkp çapında bir dişli çark (döner tabla) vasıtasıyla iletilir. Platform ile sabit taban arasında dp çapında makaralar (makaralar) bulunmaktadır. Bu durumda, vinç motorunun sürtünme kuvvetlerinden kaynaklanan gücü ve torku, ileri geri hareket durumuna benzer şekilde bulunur, yani:

Burada bilinen değerlere ek olarak: G2, üzerindeki tüm ekipmanlarla birlikte döner tablanın ağırlığıdır, N; ωl — açısal hız, platformlar, rad/sn; in - salınım mekanizması dişli kutusunun dişli oranı ve şanzımanın tahrik dişlisi - döner tabla.

Vinç elektrikli tahrikinin gücünü belirlerken, bazı durumlarda yokuşta çalışırken yükteki değişikliği hesaba katmak gerekir. Dönen mekanizmalar üzerindeki rüzgar yükü, yüke, vinç bomuna ve karşı ağırlığa etki eden rüzgar kuvvetlerindeki fark dikkate alınarak belirlenir.
Vinç mekanizmaları için elektrikli tahrikler tasarlanırken, motor seçiminin sonunda, elektrikli tahrik, verileri tablo 1'de verilen izin verilen hızlanma değerleri için kontrol edilir.
Tablo 1 Mekanizmaların adı ve amaçları
Mekanizmaların adı ve amaçları Hızlanma, m / s2 Sıvı metalleri, kırılgan nesneleri, ürünleri, çeşitli montaj işlerini kaldırmaya yönelik kaldırma mekanizmaları 0,1 Montaj parklarının ve metalurji atölyelerinin kaldırma mekanizmaları 0,2 — 0,5 Kavrama vinçlerinin kaldırma mekanizmaları 0,8 Kaldırma mekanizmaları hassas montaj işleri ve sıvı metallerin, kırılgan nesnelerin taşınması için tasarlanmış vinçlerin hareketi 0,1 - 0,2 Tam yerçekimi çekim kuvveti ile hareket mekanizmaları 0,2 - 0,7 Tam Kavrama Vinç Arabaları 0,8 — 1,4 Vinç Fırdöndüleri 0,5 — 1,2