Asansörler ve kaldırma makineleri için motorların güce göre seçimi
 Konut ve idari binaların modern yolcu ve yük asansörleri ile mayın kaldırmaya yönelik bazı makineler, bir karşı ağırlıkla veya bazen denildiği gibi bir karşı ağırlıkla gerçekleştirilir. Madencilik makinelerinde dengeleme, daha önce de belirtildiği gibi, genellikle bir karşı ağırlık tarafından değil, ikinci bir kaldırma gemisi tarafından yapılır.
Konut ve idari binaların modern yolcu ve yük asansörleri ile mayın kaldırmaya yönelik bazı makineler, bir karşı ağırlıkla veya bazen denildiği gibi bir karşı ağırlıkla gerçekleştirilir. Madencilik makinelerinde dengeleme, daha önce de belirtildiği gibi, genellikle bir karşı ağırlık tarafından değil, ikinci bir kaldırma gemisi tarafından yapılır.
Asansörler için karşı ağırlık, kaldırma aracının (kabin) ağırlığı ile kaldırılacak nominal yükün bir kısmını dengelemek için seçilir:

burada GH, nominal kaldırma yükünün ağırlığıdır, N; G0 — kabin ağırlığı, N; Gnp karşı ağırlığın ağırlığıdır, N; α dengeleme faktörüdür ve genellikle 0.4-0.6'ya eşit alınır.
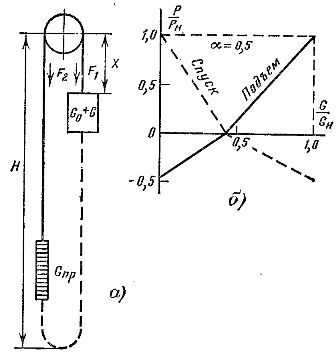
Pirinç. 1. Asansör motor şaftına binen yükün hesaplanması.
Ağır gemileri dengeleme ihtiyacı açıktır, çünkü onları bir karşı ağırlık olmadan hareket ettirmek için motor gücünde buna karşılık gelen bir artış gerekir. Belirli bir yük eğrisi için eşdeğer güç belirlenirken, nominal yükün bir kısmını dengeleme yeteneği ortaya çıkar.Örneğin, asansör esas olarak yükü kaldırmak ve boş kabini indirmek için çalışıyorsa, yük diyagramına göre eşdeğer motor gücünün α = 0,5'te minimum olduğunu takip etmek zor değildir.
Bir karşı ağırlığın varlığı, motorun yük eğrisinin düzleşmesine yol açar ve bu da çalışma sırasında ısınmasını azaltır. ŞEK. 1, a, ardından karşı ağırlığın ağırlık değeri ile

ve dengeleme halatı ve kabin sürtünmesinin olmaması ve kılavuzlarda karşı ağırlık, şunları yazabilirsiniz:


gk, 1 m halatın ağırlığı, N / m'dir.
Gerilme direnci

Motor mili torku ve gücü aşağıdaki formüllere göre belirlenir:
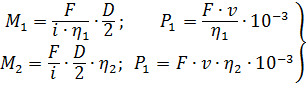
burada M1, P1 — sürücü motor modunda çalışırken tork ve güç, sırasıyla Nm ve kW; M2, P2 — sürücü jeneratör modunda çalışırken tork ve güç, sırasıyla Nm ve kW; η1, η2 — doğrudan ve ters enerji aktarımı ile sonsuz dişli verimliliği.
η1 ve η2 değerleri doğrusal olmayan şekilde sonsuz milin hızına bağlıdır ve formüllerle hesaplanabilir

burada λ, solucanın indeksleme silindiri üzerindeki spiral hattın yükselme açısıdır; k1, dişli kutusunun yataklarındaki ve yağ banyosundaki kayıpları hesaba katan bir katsayıdır; ρ — sonsuz milin dönme hızına bağlı olarak sürtünme açısı.
Çekme kasnağı üzerindeki kuvvet formülünden, bir dengeleme halatının yokluğunda, kaldırma vincinin elektrikli tahrikindeki yükün, kaldırma teknesinin konumuna bağlı olduğu sonucu çıkar.
10 tona kadar yüksek yük kapasiteleri, 10 m/s ve üzeri yüksek hareket hızları, 200-1000 m yüksek kaldırma yükseklikleri ve zorlu çalışma koşulları nedeniyle, maden kaldırma makineleri büyük kütleli çelik halatlarla donatılmıştır. Örneğin, bir geçişin alt ufka indirildiğini, diğerinin yukarıda olduğunu ve o anda boşaltıldığını hayal edin. Bu konumda, baş ipin tamamı dengesizdir ve yükselişin başlangıcında motor, yükün ve halatın ağırlığı tarafından üretilen statik momentin üstesinden gelmelidir. İpin dengelenmesi atlamaların yolunun ortasında gerçekleşir. Sonra tekrar kırılır ve halatın inen kısmının ağırlığı motorun yükünü boşaltmaya yardımcı olur.
Özellikle derin madenlerde eşit olmayan yükleme, motor gücünü fazla tahmin etme ihtiyacına yol açar.Bu nedenle, 200-300 m'den daha yüksek kaldırma yüksekliklerinde, baş kaldırma halatlarının asılı duran kuyruk halatları yardımıyla dengelenmesi önerilir. kaldırma gemilerinden. Genellikle kuyruk halatı, ana halatla aynı kesit ve uzunlukta seçilir ve bunun sonucunda kaldırma sistemi dengelenir.
Asansörlerin ve kaldırma makinelerinin çalışması sırasında yük değiştiğinden, her yük için motor şaftının gücünü veya momentini belirlemek için, bu değerlerin yüke bağımlılığının bir grafiğini oluşturmak uygundur. Şekil l'de gösterilenle yaklaşık olarak aynı karaktere sahip birkaç noktada. 1b ve ardından yük diyagramlarının oluşturulmasında kullanın.
Bu durumda, büyük ölçüde PV aktivasyonunun göreli süresi ve motorun saat başına başlatma sayısı tarafından belirlenen, kaldırma makinesinin elektrikli tahrikinin çalışma modu bilinmelidir. Örneğin asansörler için elektrikli tahrikin çalışma modu, montaj yeri ve asansörün amacına göre belirlenir.
Konut binalarında, trafik programı nispeten tekdüzedir ve ilgili süre — PV ve motor çalıştırma frekansı h, sırasıyla %40'a eşittir ve saatte 90-120 çalıştırmaya eşittir. Yüksek katlı ofis binalarında çalışanların işe geliş ve gidiş saatlerinde asansör yükü keskin bir şekilde artar ve buna bağlı olarak öğle tatilinde yüksek değerler PV ve h-40-60% ve 150 olacaktır. Saatte -200 başlatma.
Çizim tamamlandıktan sonra motor mili üzerindeki statik yük, elektrikli tahrik sistemi ve vinç motoru seçildikten sonra, geçici durumun yük diyagramı üzerindeki etkisi dikkate alınarak bir yük diyagramı oluşturmanın ikinci aşaması gerçekleştirilebilir.
Tam bir yük diyagramı oluşturmak için, elektrikli tahrikin hızlanma ve yavaşlama sürelerini, kapıların açılıp kapanma sürelerini, arabanın hareketi sırasındaki durak sayısını, süreyi hesaba katmak gerekir. en tipik çalışma döngüsü sırasında yolcuların giriş ve çıkışları. Kapıları otomatik çalışan asansörlerde kapıların çalışması ve kabinin dolmasıyla belirlenen toplam zaman kaybı 6-8 sn'dir.
Kabinin nominal hızı ve izin verilen hızlanma (yavaşlama) ve sarsıntı değerleri biliniyorsa, kabinin hızlanma ve yavaşlama süreleri hareket diyagramından belirlenebilir. Elektrikli tahrik sisteminin belirtilen statik ve dinamik modlarına göre oluşturulan yük şemasına göre, iyi bilinen yöntemlerden biri kullanılarak ısıtıldığında motorun hesaplamalı bir hesaplamasının yapılması gerekir: ortalama kayıplar veya eşdeğer değerler.
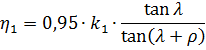
Pirinç. 2. Elektrikli tahrikin torkunun kabinin yüküne bağımlılıkları, asansör birinci katta (1), şaftın ortasında (2) ve son katta (3) olduğunda.

Bir örnek. Yüksek hızlı bir yolcu asansörünün teknik verilerine göre farklı çalışma modlarında motor şaftı üzerindeki statik momentleri belirleyiniz.
verilen:
• maksimum yük kapasitesi Gn = = 4900 N;
• hareket hızı v = 1 m / s;
• kaldırma yüksekliği H = = 43 m;
• kabin ağırlığı G0 = 6860 N;
• karşı ağırlık ağırlığı Gnp = 9310 N;
• çekme kirişinin çapı Dm = 0,95 m;
• vinç dişli kutusunun aktarım oranı i = 40;
• Şaft kılavuzları üzerindeki kabin sürtünmesi η = 0,6 dikkate alındığında iletim verimliliği;
• halatın ağırlığı GKAH = 862 N.
tablo 1

Gerilme direnci:


Asansör sistemi çalıştığında Fc > 0 olduğunda tahrik eden elektrik makinesi motor modunda, Fc 0 olduğunda ve Fc < 0 olduğunda motor modunda çalışır.
Statik momentlerin formüle göre hesaplanmasının sonuçları bir tabloda özetlenmiştir. 1 ve şek. 2.Daha doğru hesaplamaların, Fc'nin %5-15'i olan mil kılavuzlarının hareketine karşı direnci hesaba katması gerektiğini unutmayın.