Tek fazlı asenkron motorların özellikleri
Tek fazlı asenkron motorlar, teknolojide ve günlük yaşamda yaygın olarak kullanılmaktadır. Bir watt'ın bir kısmından yüzlerce watt'a kadar tek fazlı asenkron elektrik motorlarının üretimi, tüm düşük güçlü makinelerin üretiminin yarısından fazladır ve güçleri sürekli artmaktadır.
Tek fazlı motorlar genellikle iki kategoriye ayrılır:
-
endüstriyel ve ev tipi elektrik motorlarını içeren genel amaçlı motorlar;
-
otomatik cihazların motorları — kontrollü ve kontrolsüz AC motorlar ve özel düşük güçlü elektrikli makineler (takojeneratörler, döner transformatörler, selsinler, vb.).
Asenkron elektrik motorlarının önemli bir kısmı, tek fazlı bir AC şebekesinde çalışmak üzere tasarlanmış genel amaçlı motorlardır. Bununla birlikte, hem tek fazlı hem de üç fazlı şebekelerde çalışmak üzere tasarlanmış oldukça kapsamlı bir evrensel asenkron elektrik motorları grubu vardır.
Üniversal motorların tasarımı pratik olarak farklı değildir. üç fazlı asenkron makinelerin geleneksel tasarımı… Üç fazlı bir ağda çalışırken, bu motorlar üç fazlı motorlarınkine benzer özelliklere sahiptir.
Tek fazlı motorlar sincap kafes rotorlu olup, stator sargısı farklı versiyonlarda imal edilebilmektedir. Çoğu zaman, stator üzerine yuvaların üçte ikisini dolduran bir çalışma sargısı ve yuvaların kalan üçte birini dolduran bir başlangıç sargısı yerleştirilir. Çalışan bobin sürekli çalışma için hesaplanır ve başlangıç bobini sadece başlangıç süresi için hesaplanır. Bu nedenle küçük kesitli telden yapılmıştır ve önemli sayıda dönüş içerir. Başlangıç torku oluşturmak için, başlangıç sargısı, faz kaydırma elemanları - dirençler veya kapasitörler içerir.
Düşük güçlü asenkron motorlar, stator üzerine yerleştirilen çalışma sargısı boşlukta 90° karışmış iki faza sahip olduğunda iki fazlı olabilir. Aşamalardan birinde, sürekli olarak bir faz kaydırma elemanı bulunur - bobin akımları arasında belirli bir faz kayması sağlayan bir kapasitör veya direnç Top.
Genellikle fazlardan birine kalıcı olarak bağlı bir kondansatöre sahip bir motor olarak adlandırılır. kondansatör… Faz kaydırmalı kapasitörün kapasitansı sabit olabilir, ancak bazı durumlarda kapasitans değeri başlatma ve çalışma modu için farklı olabilir.
Tek fazlı asenkron motorların karakteristik bir özelliği, rotoru farklı yönlerde döndürme yeteneğidir. Dönme yönü, ilk torkun yönü ile belirlenir.
Bu nedenle, düşük rotor direncinde (Ccr < 1), tek fazlı bir motor ters modda çalışamaz. Motor modu rotor devirlerine karşılık gelir 0 <n <nc daha yüksek bir hızda jeneratör modu gerçekleşir.
Tek fazlı motorların bir özelliği, maksimum torkunun rotorun direncine bağlı olmasıdır. Rotorun aktif direnci arttıkça maksimum tork azalır ve büyük direnç değerleri Skr > 1 ile negatif olur.
Bir cihazı veya mekanizmayı çalıştırmak için elektrik motorunun tipini seçerken, özelliklerini bilmek gerekir.Ana olanlar tork özellikleri (ilk çalıştırma torku, maksimum tork, minimum tork), dönüş frekansı, vibroakustik özelliklerdir. Bazı durumlarda, enerji ve ağırlık özellikleri de gereklidir.
Örnek olarak, tek fazlı bir motorun özellikleri aşağıdaki parametrelerle hesaplanır:
-
faz sayısı — 1;
-
şebeke frekansı — 50 Hz;
-
şebeke gerilimi — 220 V;
-
stator sargısının aktif direnci — 5 ohm;
-
stator sargısının endüktif direnci — 9,42 Ohm;
-
rotor sargısının endüktif direnci — 5,6 Ohm;
-
makinenin eksenel uzunluğu — 0,1 m;
-
stator sargısındaki dönüş sayısı -320;
-
stator deliği yarıçapı — 0,0382 m;
-
kanal sayısı — 48;
-
hava boşluğu — 1,0 x 103 m.
-
rotor endüktans faktörü 1.036.
Tek fazlı sargı, stator yuvalarının üçte ikisini doldurur.
İncirde. Şekil 1, tek fazlı bir elektrik motorunun akımının ve elektromanyetik kayma torkunun bağımlılıklarını gösterir. İdeal rölanti modunda, şebeke tarafından esas olarak bir manyetik alan oluşturmak için tüketilen motor akımı nispeten büyük bir değere sahiptir.
Simüle edilmiş bir motor için, mıknatıslama akımının büyüklüğü, aynı güce sahip üç fazlı motorlar için başlangıç akımının yaklaşık %30'u kadardır - %10-15.İdeal rölanti modundaki elektromanyetik moment, rotor devresinin direnci arttıkça artan negatif bir değere sahiptir. -de kayma C= 1, elektromanyetik moment sıfırdır, bu da modelin doğru çalıştığını doğrular.
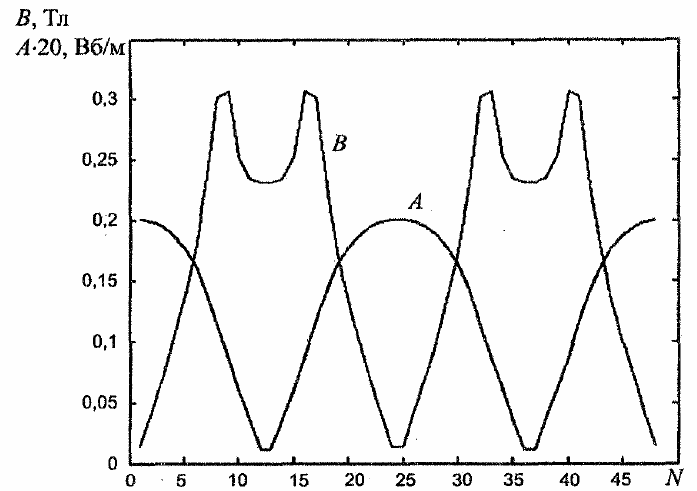
İncir. 1. Kayma sırasında motor boşluğundaki vektör potansiyeli ve manyetik indüksiyon zarfları s = 1
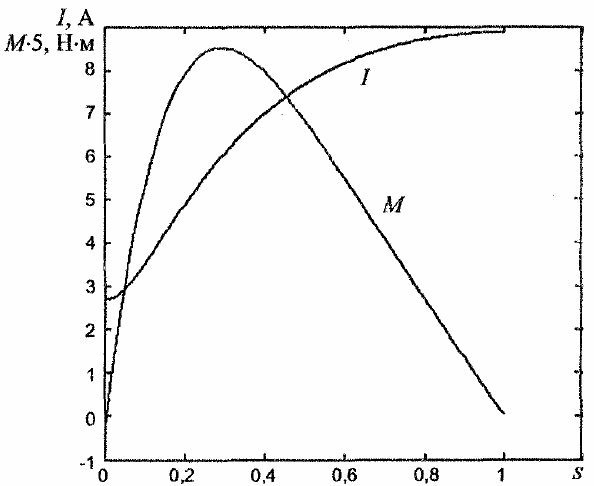
Pirinç. 2. Tek fazlı bir asenkron motorun kaymaya bağlı akımı ve elektromanyetik torku
Yararlı ve tüketilen gücün kaymaya bağımlılığı (Şekil 3) geleneksel bir karaktere sahiptir. İdeal rölanti modunda motorun verimi, negatif torka karşılık gelen negatif bir işarete sahiptir ve bu modda güç faktörü çok düşüktür (simüle edilmiş motor için 0,125).
Güç faktörünün üç fazlı motorlara göre daha düşük olması, mıknatıslama akımının yüksek büyüklüğü ile açıklanmaktadır. Yük arttıkça, güç faktörünün değeri artar ve üç fazlı motorlarınkiyle karşılaştırılabilir hale gelir (Şekil 4).
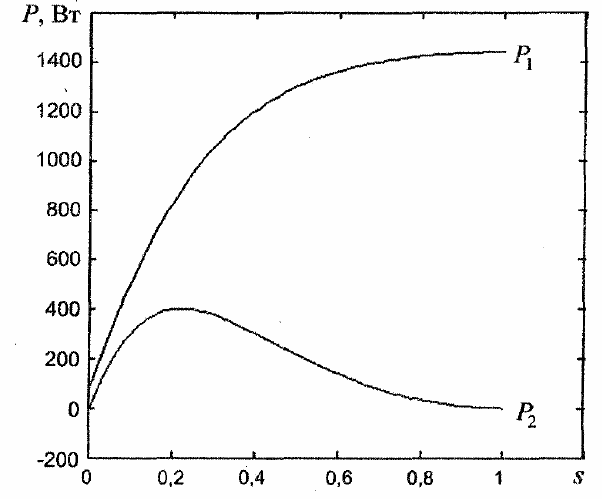
Pirinç. 3. Tek fazlı bir asenkron motorun faydalı ve tüketilen gücünün kaymaya bağlılığı
Pirinç. 4. Kaymada tek fazlı bir asenkron motorun yararlı eylem katsayısı ve gücünün bağımlılığı
Rotorun aktif direnci arttıkça, elektromanyetik momentin büyüklüğü azalır ve birliğin üzerindeki kritik kaymalarda negatif olur.
İncirde. Şekil 5, tek fazlı bir kayma motorunun elektromanyetik momentinin, motorun ikincil ortamının elektriksel iletkenliğinin farklı değerlerine bağımlılığını göstermektedir.
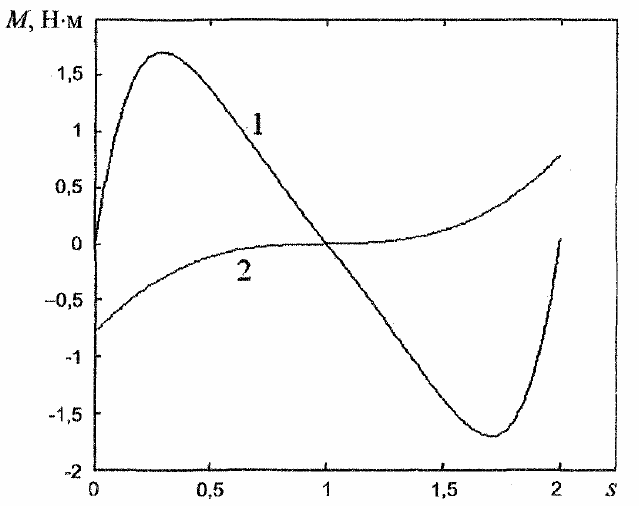
Pirinç. 5.Farklı rotor dirençlerinde (1 — 17 x 106 Cm / m, 2 — 1,7 x 106 Cm / m) tek fazlı kayma motorunun elektromanyetik momentinin bağımlılığı
Kondansatör motorları, şebekeye kalıcı olarak bağlı iki sargıya sahiptir. Bunlardan biri doğrudan ağa bağlanır, ikincisi gerekli faz kaymasını sağlayan bir kapasitör ile seri bağlanır.
Her iki sargı da stator üzerinde aynı sayıda yarık işgal eder ve dönüş sayısı ve kapasitörün kapasitansı, bir miktar kayma ile dairesel dönen bir manyetik alan sağlanacak şekilde hesaplanır. Çoğu zaman, nominal kayma bu şekilde kabul edilir. Ancak bu durumda, ilk tork nominal olandan çok daha küçük çıkıyor.
Başlangıç modundaki manyetik alan eliptiktir; Manyetik alanın ters yönde hareket eden bileşenlerinin etkisi büyük ölçüde etkilenir.Kapasitörün kapasitansı, başlangıçta dairesel bir alan elde etme koşulundan seçilerek artırılırsa, torkta bir azalma olur ve bir nominal kaymada enerji göstergelerinde azalma.
Dairesel alan nominal moddakinden daha büyük bir kaymaya karşılık geldiğinde üçüncü bir varyant da mümkündür. Ancak bu yol da optimal değildir, çünkü torktaki artışa kayıplarda önemli bir artış eşlik eder. Bir kapasitör motorunun başlangıç torkunda bir artış, rotorun aktif direncini artırarak elde edilebilir. Bu yöntem, her kaymada kayıpların artmasına ve bunun sonucunda motorun veriminin düşmesine neden olur.
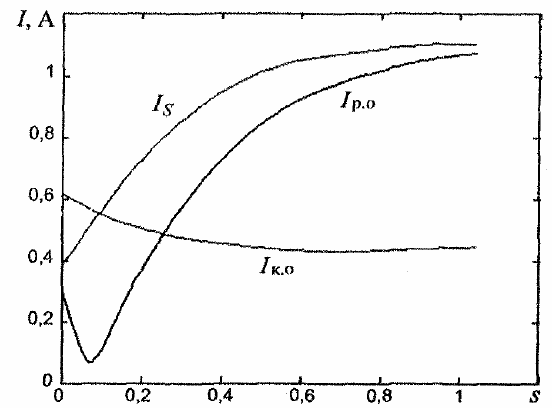
Pirinç. 6.Kayma kondansatör motor akımlarının bağımlılığı (Azp.o — çalışma bobini akımı, Azk.o — kapasitör bobin akımı, E — motor akımı)
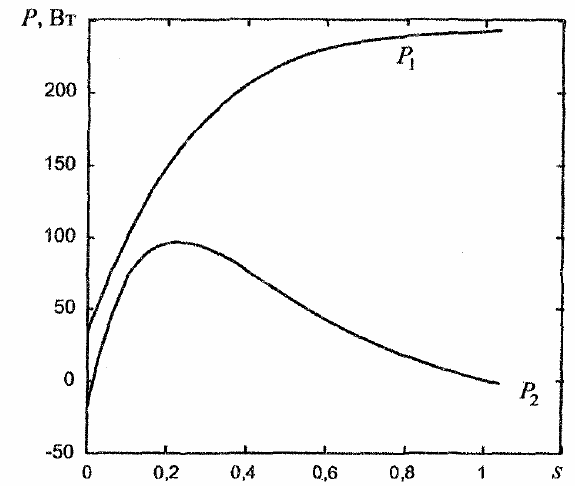
Pirinç. 7. Bir kapasitörün tüketilen P1 ve yararlı P2 kayma gücüne bağımlılık
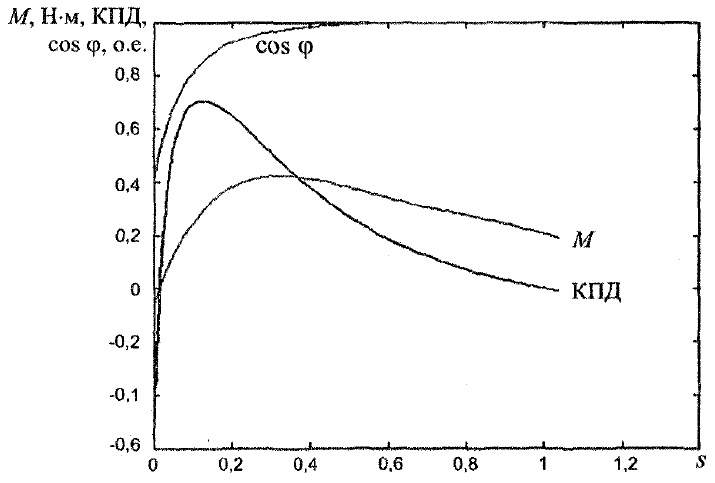
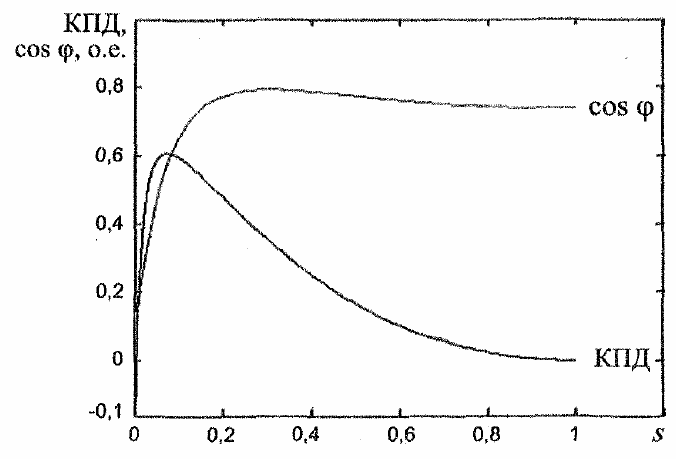
Pirinç. 8. Yararlı etki ve güç katsayısının ve kayma kondansatör motorunun elektromanyetik momentinin bağımlılığı
Kapasitör motoru oldukça tatmin edici bir enerji performansına, değeri üç fazlı bir motorun güç faktörünü aşan yüksek bir güç faktörüne ve artırılmış rotor direncine ve önemli kapasiteye, yüksek başlangıç torkuna sahiptir. Aynı zamanda yukarıda da bahsedildiği gibi motorun verim değeri düşmüştür.
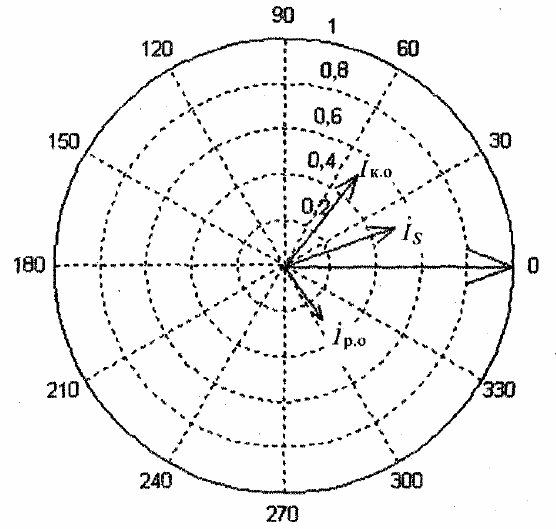
Pirinç. 9. s = 0.1 kaymasında kapasitör motorunun vektör diyagramı
Vektör diyagramı (Şekil 9), kapasitör kapasitansının seçilen değerinde, kapasitör bobin akımının şebeke voltajına göre önde olduğunu ve çalışan bobin akımının geride olduğunu göstermektedir. Diyagram ayrıca nominal değere yakın kayarken motorun manyetik alanının eliptik olduğunu gösterir. Dairesel bir alan elde etmek için, kapasitörün kapasitans değeri, iki bobindeki akımların büyüklükleri eşit olacak şekilde azaltılmalıdır.
Bu konuda ayrıca bakınız:Çok hızlı tek fazlı kapasitör motorları