Kurulum ve çalışma sırasında asenkron motor kayması nasıl belirlenir
Motor devri önemli ölçüde farklıysa eşzamanlı olarak, doğrudan elektrik motorunun miline bağlı bir takometre veya takojeneratör ile ölçülür ve motorun kayması S = (n1 - n2) / n1 formülü ile belirlenir, burada n1 = 60f / p - senkron dönüş frekansı; n2 gerçek hızdır.
Bir elektrik motorunun kaymasını belirlemek için bu yöntemin avantajları: ölçüm hızı ve hem sabit hem de değişken hızı gerçekleştirme yeteneği. Bu ölçüm yönteminin dezavantajları, geleneksel takometrelerin düşük doğruluğunu (%1-8 hata) ve kalibrasyonlarının zorluğunu içerir. Ek olarak, takometre mekanizmasındaki sürtünme kayıpları dikkate değer bir yükü temsil ettiğinden, takometre düşük güçlü elektrik motorlarını test ederken kullanılamaz.
Çeşitli ölçümler yapmak için, el tipi bir takometre genellikle silindirin ucuna yerleştirilmiş çeşitli şekil ve amaçlara sahip bir dizi değiştirilebilir uçla birlikte verilir (Şekil 1). Bu uçlardan en yaygın kullanılanı, metal bir kartuşa monte edilen kauçuk konidir. Bu uçların tümü, elektrik makinesinin şaftının ucundaki sivri girintiye temas etmek için kullanılır. Kauçuk orta uç, yüksek frekanslar için, çelik uç ise düşük ila orta frekanslar için kullanılır.
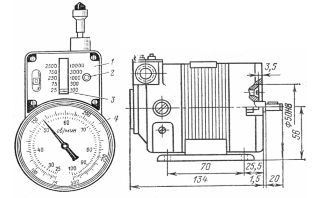 Pirinç. 1. IO-10 tipi santrifüj takometre ve takojeneratörün genel görünümü: 1 - ölçek; 2 — geçiş düğmesi; 3 — limit göstergesi; 4 — çevir
Pirinç. 1. IO-10 tipi santrifüj takometre ve takojeneratörün genel görünümü: 1 - ölçek; 2 — geçiş düğmesi; 3 — limit göstergesi; 4 — çevir
Milin ortasında bir oyuk varsa, takometre milinin üzerine yerleştirilen bir uzantı ve uzantının ilgili ucu kullanılır. Merkezlerin yokluğunda veya yetersizliğinde yan yüzeyden (lastik halka) dönen milin yüzeyine bastırılan bir merdane kullanılır.
Spesifik ölçüm koşullarına uygun olarak bir fikstür (uzatma ucu) seçin. Ölçüme başlamadan önce, oluğun ortasındaki veya milin yüzeyindeki gresi, kiri, tozu temizleyin.
Elektrik motorunun dönüş hızını ölçmek için öncelikle takometrenin gerekli ölçüm limitini ayarlamanız gerekir. Frekans ölçüm sırası bilinmiyorsa, takometrenin hasar görmesini önlemek için ölçüm en yüksek limitten başlamalıdır.
Ölçüm kısa bir süre için (3 — 5 s) takometrenin ucunu dönen mile hafifçe bastırarak, takometre milinin ekseni ölçülen milin ekseniyle çakışacak şekilde veya gerektiğinde silindiri kullanarak, buna paraleldir.

Kayma %5'i geçmiyorsa, neon lamba kullanılarak stroboskopik yöntemle hız ölçülebilir.
Motor milinin ucuna tebeşirle çapsal bir çizgi çizilir. Motor çalışırken, motorla aynı frekansa sahip bir ağdan güç alan bir neon lamba ile aydınlatılır. Gözlemci şaftın ucunda bir çizgi değil, şaftın dönme yönünün tersine yavaşça dönen bir yıldız görür. Yıldız ışınlarının sayısı motorun kutup sayısına ve neon lambanın konumuna bağlıdır. Lambanın her iki elektrotundan gelen ışık şaftın ucuna düşerse, görünen yıldızın ışın sayısı 2p olur.Eğer şaftın tebeşir çizgisiyle olan ucu sadece bir elektrotla aydınlatılıyorsa, yıldızın ışın sayısı 2p olur. görünen yıldız kutup sayısına eşittir.
Kronometre tarafından ölçülen t süresi (genellikle 30 s) boyunca, görünür yıldız m'nin dikey konumdan geçen ışınlarının sayısı sayılır. Görünen yıldızın ışın sayısı 2p olduğu için kayma
burada f1, bir neon lambanın besleme ağının frekansıdır.
f1 = 50 Hz'de.
Stroboskopik yöntemin başka bir varyantı aşağıdaki gibidir. Disklerden biri ön taraftan motor miline sabitlenmiştir (Şek. 2). Zinciri birleştirin (şek. 3). İki kutuplu bir makinede, 2p = 2 etiketli bir disk şaft üzerine sabitlenir ve yama elektrotlu bir neon lamba ile aydınlatılır.

Pirinç. 2… Asenkron motorun kutup sayısına bağlı olarak stroboskopik disklerin görüntüsü
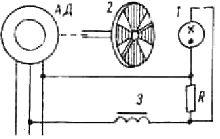
Pirinç. 3… Stroboskopik kayma algılama yöntemi için neon lamba anahtarlama şeması: 1 — neon lamba, 2 — stroboskopik disk, 3 — endüksiyon bobini
Rotor eşzamansız olarak döner ve alanın gerisinde kalır, bu nedenle diskin rotorun dönüş yönünün tersine yavaşça döndüğü görülür.t m süresi boyunca siyah sektörler sabit bir noktadan geçerse (bir yatak üzerinde sabitlenmiş bir ok), kayma değeri şu ifade ile verilir:
Sabit bir noktadan geçen sektörlerin sayımı, kronometrenin başladığı andan itibaren değil, şamandıranın bir sonraki geçişinden itibaren başlamalıdır.
Keskin bir görüntü elde etmek için, eğrisi şekil 2'de gösterilen lambaya bir voltaj uygulanmalıdır. 4… Lamba, terminallerindeki voltaj ateşleme eşiği denilen bir değere ulaştığında yanar.
Pirinç. 4... Keskin voltajlı bir dalga formu elde etmek için bir neon lambayı yakma şeması: 1 — neon lamba; 2 - X endüktif direncine sahip oldukça doymuş bir manyetik devreye sahip reaktif bobin (R ve X dirençleri arasındaki voltaj düşüşü yaklaşık olarak aynıdır)
Endüksiyon bobini kullanılarak motor kaymasının belirlenmesi. Bu yöntem, kayma ile orantılı bir frekansla endüksiyon bobininin dönüşlerini geçen rotor Fr'nin dağılım akılılarının (Şekil 5) dönme sıklığının izlenmesine dayanır.
Pirinç. 5. Bir endüksiyon bobini kullanarak bir asenkron elektrik motorunun rotor kaymasını ölçmek için şema
Bobinin terminallerine hassas bir milivoltmetre (tercihen ölçeğin ortasında sıfır ile) bağlanır; bobin, rotor milinin ucunda bulunur. Bobini farklı yönlerde çevirerek aletin okunun maksimum salınımlarının gözlemlendiği konumu bulurlar. t zamanında k tam salınım sayısından kayma değeri hesaplanır

ve f = 50 Hz'de.

Hesaplama için 50 tam salınım saymak ve bir kronometre kullanarak zamanı not etmek uygundur. Daha sonra: .
Endüksiyon bobini olarak, bir röle bobini veya 10-20 bin dönüşlü bir DC kontaktör kullanabilirsiniz (veya en az 3000 dönüşlü bir bobin sarın). Manyetik akıyı artırmak için, bobine birkaç trafo çeliği şeridinden yapılmış bir çekirdek yerleştirilir. İndüksiyon bobini yöntemi çok basittir ve her tür makine için uygundur.
Rotor sargılı asenkron motorlarda, yukarıda açıklanan yöntemlere ek olarak, kayma, rotor fazlarından birine bağlı bir manyetoelektrik ampermetre kullanılarak ve rotor devresinde anahtarlamasız direnç varlığında bağlı bir voltmetre kullanılarak belirlenebilir. rotor halkalarına. Çift taraflı skalalı aletlerin kullanılması tavsiye edilir. Bir endüksiyon motorunun kayması, tıpkı endüksiyon bobini yöntemini kullanırken olduğu gibi, cihaz iğnesinin tam salınımlarının sayısından hesaplanır.
