Elektrik motorlarının mekanik özellikleri ve üretim mekanizmaları
 Bir elektrikli sürücü tasarlarken, elektrik motoru, mekanik özellikleri üretim mekanizmasının mekanik özellikleriyle eşleşecek şekilde seçilmelidir. Mekanik özellikler, sabit durumdaki değişkenlerin ilişkisini verir.
Bir elektrikli sürücü tasarlarken, elektrik motoru, mekanik özellikleri üretim mekanizmasının mekanik özellikleriyle eşleşecek şekilde seçilmelidir. Mekanik özellikler, sabit durumdaki değişkenlerin ilişkisini verir.
Mekanizmanın mekanik bir karakteristiği, açısal hız ile mekanizmanın motor miline indirgenmiş direnç momenti arasındaki ilişki olarak adlandırılır) ω = f (Mc).
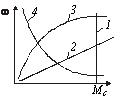
Pirinç. 1. Mekanizmaların mekanik özellikleri
Tüm çeşitlilik arasında, mekanizmaların birkaç karakteristik mekanik özelliği vardır:
1. Hızdan bağımsız bir direnç momenti özelliği (Şekil 1'de düz çizgi 1). Hızdan bağımsız mekanik karakteristik, bu durumda dikey olmak üzere dönme eksenine paralel düz bir çizgi olarak çizilir. Böyle bir özellik, örneğin vinçler, bocurgatlar, sabit basma yüksekliğine sahip pistonlu pompalar vb. tarafından sağlanır.
2.Hıza doğrusal olarak bağlı bir direnç momentine sahip bir karakteristik (Şekil 1'de 2. sıra). Bu bağımlılık, örneğin, sabit bir yükte çalışan bağımsız olarak uyarılmış bir DC jeneratörünün tahrikinde doğaldır.
3. Torkta doğrusal olmayan bir artış ile karakteristik (Şekil 1'deki eğri 3). Tipik örnekler, fanların, santrifüj pompaların, pervanelerin çalışmasıdır. Bu mekanizmalar için, Mc momenti açısal hızın karesine bağlıdır ω... Bu sözde parabolik (fan) mekanik karakteristik.
4. Doğrusal olarak azalan direnç momenti özelliği (Şekil 1'deki eğri 4). Burada sürükleme momenti dönme hızı ile ters orantılıdır. Bu durumda güç, mekanizmanın tüm çalışma hızı aralığı boyunca sabit kalır. Örneğin, bazı metal kesme makinelerinin ana hareket mekanizmalarında (tornalama, frezeleme, delme), Mc momenti ω ile ters orantılı olarak değişir ve mekanizma tarafından tüketilen güç sabit kalır.
Elektrik motorunun mekanik özelliklerine, açısal hızının ωd = f (M) torkuna bağımlılığı denir. Burada, motor mili üzerindeki M momentinin, dönüş yönünden bağımsız olarak, pozitif bir işarete sahip olduğu akılda tutulmalıdır - hareket momenti. Aynı zamanda, direnç momenti Mc'nin işareti negatiftir.
Örnek olarak, Şek. 2, mekanik özellikleri gösterir: 1 - senkron motor; 2 — bağımsız uyarmalı doğru akım motoru; 3 — Seri uyarımlı DC motor.
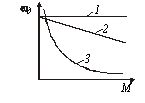 Pirinç. 2. Elektrik motorlarının mekanik özellikleri
Pirinç. 2. Elektrik motorlarının mekanik özellikleri
Bir elektrikli sürücünün mekanik özelliklerinin özelliklerini değerlendirmek için karakteristik sertlik kavramı kullanılır.Mekanik özelliğin sertliği, ifade ile belirlenir.
β = dM / dω
nerede dM — motor torkundaki değişiklik; dωd — açısal hızdaki karşılık gelen değişiklik.
Doğrusal özellikler için β değeri sabit kalır, doğrusal olmayanlar için çalışma noktasına bağlıdır.
Bu konsepti kullanarak, Şekil 1'de gösterilen özellikler. 2, niteliksel olarak şu şekilde değerlendirilebilir: 1 — kesinlikle katı (β = ∞); 2 — katı; 3 — yumuşak.
Kesinlikle zor bir özellik — motor yükü sıfırdan nominale değiştiğinde motor dönüş hızı değişmeden kalır. Senkron motorlar bu özelliğe sahiptir.
Rijit karakteristik — yük sıfırdan nominale değiştiğinde dönüş hızı çok az değişir. Bu karakteristik özelliğin lineer kısmı bölgesinde paralel uyarmalı bir doğru akım motoru ve bir endüksiyon motoru vardır.
Rijit karakteristik, yük sıfırdan nominale değiştirildiğinde hız değişiminin nominal hızın yaklaşık %10'unu aşmadığı bir özellik olarak kabul edilir.
Yumuşak karakteristik — motor hızı, yükteki nispeten küçük değişikliklerle önemli ölçüde değişir. Bu özellik, seri, karışık veya paralel uyarmalı, ancak armatür devresinde ek dirençli ve ayrıca rotor devresinde dirençli asenkron olan bir doğru akım motoruna sahiptir.
Çoğu üretim mekanizması için, katı mekanik özelliklere sahip asenkron sincap kafesli motorlar kullanılır.
Elektrik motorlarının tüm mekanik özellikleri doğal ve yapay olarak ayrılmıştır.
Doğal mekanik özellikler, parametrelerin nominal değerleri ile motorun çalışma koşullarını ifade eder.
Örneğin, paralel uyarmalı bir motor için, armatür geriliminin ve uyarma akımının nominal değerlere sahip olduğu ve armatür devresinde ek direncin olmadığı durum için doğal karakteristik çizilebilir.
Asenkron motorun doğal karakteristiği, rotor devresinde ek direnç olmaması koşuluyla, motor statoruna beslenen alternatif akımın anma gerilimi ve anma frekansına karşılık gelir.
Böylece, her motor için yalnızca bir doğal özellik ve sınırsız sayıda yapay özellik oluşturulabilir. Örneğin, bir DC motorun armatür direncinin veya bir asenkron motorun rotor devresindeki her yeni değeri, kendi mekanik özelliklerine sahiptir.
