Dijital cihazlar: parmak arası terlikler, karşılaştırıcılar ve kayıtlar
 Dijital cihazlar mantıksal öğeler üzerine kuruludur, bu nedenle mantıksal cebir yasalarına uyarlar. Dijital teknolojinin temel cihazları, mantık cihazları ile birlikte parmak arası terliklerdir.
Dijital cihazlar mantıksal öğeler üzerine kuruludur, bu nedenle mantıksal cebir yasalarına uyarlar. Dijital teknolojinin temel cihazları, mantık cihazları ile birlikte parmak arası terliklerdir.
Tetik (İngilizce tetik - tetik) - iki kararlı duruma sahip olan ve harici bir dürtü etkisi altında bir durumdan diğerine atlayabilen bir elektronik cihaz.
Tetikleyiciler veya daha doğrusu tetik sistemleri, uzun süre iki kararlı durumdan birinde kalma ve bunları harici sinyallerin etkisi altında değiştirme yeteneğine sahip büyük bir elektronik cihaz sınıfı olarak adlandırılır. Her tetikleme koşulu, çıkış voltajı değeri tarafından kolayca tanınır.
Her tetikleme durumu, belirli bir (yüksek veya düşük) çıkış voltajı seviyesine karşılık gelir:
1) tetik bir duruma ayarlanmıştır — seviye «1».
2) flip-flop sıfırlanır - çıkışta "0" seviyesi.
Kararlı durum istenildiği kadar kalır ve harici bir darbe ile veya besleme gerilimi kapatılarak değiştirilebilir. Che.bir flip-flop, en küçük bilgi birimini (bir bit) "0" veya "1" depolayabilen temel bir bellek elemanıdır.
Flip-flop'lar, ayrı elemanlar, mantık elemanları, bir entegre devre üzerine inşa edilebilir veya bir entegre devrenin parçasıdır.
Ana parmak arası terlik türleri şunları içerir: RS-, D-, T- ve JK paletleri... Ek olarak, parmak arası terlikler asenkron ve senkronize olarak ayrılır. Asenkron çalıştırmada, bir durumdan diğerine geçiş, bilgi girişine bir sinyalin gelmesiyle doğrudan yapılır. Veri girişlerine ek olarak, senkronize parmak arası terliklerde bir saat girişi bulunur. Anahtarlamaları, yalnızca etkinleştiren bir saat darbesinin varlığında gerçekleşir.
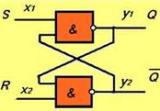
Bir RS tetikleyicinin en az iki girişi vardır: S (ayarla — ayarla) — tetikleyici seviye «1» durumuna ayarlanır ve R (sıfırlama) — tetikleyici seviye «0» durumuna sıfırlanır. (Şek. 1).
C girişinin mevcudiyetinde, flip-flop senkronizedir - flip-flop'un anahtarlanması (çıkışın durumunun değişmesi), yalnızca C girişindeki senkronizasyon (senkronizasyon) darbesinin geldiği anda gerçekleşebilir.

Şekil 1 - RS flip-flop'un geleneksel grafik gösterimi ve a) eşzamansız, b) eşzamanlı sonuçların amacı
Doğrudan çıkışa ek olarak, flip-flop, sinyali zıt olacak bir ters çıkışa da sahip olabilir.
Tablo 1, flip-flop'un çalışma sırasında alabileceği durumları göstermektedir. Tablo, S ve R giriş sinyallerinin belirli bir tn zamanındaki değerlerini ve bir sonraki tn + 1 zamanındaki flip-flop'un (doğrudan çıkışın) durumunu gösterir. darbeler. Yeni tetikleme durumu, Qn'nin önceki durumundan da etkilenir.
Che."1" tetiğine yazmamız gerekiyorsa — S girişine bir darbe veririz, «0» ise — R girişine bir darbe göndeririz.
S = 1, R = 1 kombinasyonu yasak bir kombinasyondur çünkü çıkışta hangi durumun kurulacağını tahmin etmek imkansızdır.
Tablo 1 - Senkron RS flip-flop durum tablosu

Flip-flop'un çalışması, zamanlama diyagramları kullanılarak da görülebilir (Şekil 2).
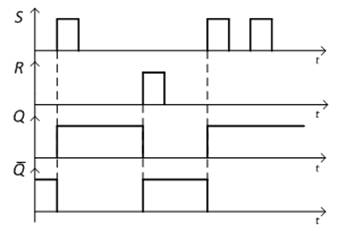
Şekil 2 - Eşzamansız bir RS flip-flop'un zamanlama diyagramları
D-tetikleyici (İngilizce gecikmeden - gecikme) bir bilgi girişine ve bir saat (senkronizasyon) girişine sahiptir (Şekil 3).
D-flip-flop, saat darbesi C'nin geldiği anda D veri girişindeki sinyali Q çıkışında depolar ve saklar. flip-flop, C = 1 olduğunda yazılan bilgileri depolar.
Tablo 2-D-flip-flop durum tablosu

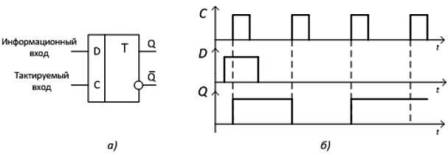
Şekil 3 — D tetikleyici: a) geleneksel grafiksel gösterim, b) çalışmanın zamanlama diyagramları
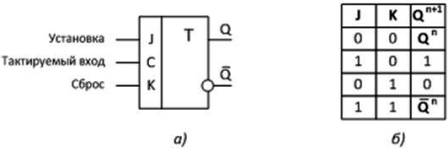
Parmak arası terlik sayma olarak da adlandırılan T-tetikleyiciler (İngiliz yuvarlanma - devrilme, takla atma), bir bilgi girişi T'ye sahiptir. T girişinin (sayma girişi) her darbesi (darbe azalması), tetiği zıt duruma geçirir.
Şekil 4, T-tetikleme sembolojisini (a) ve işlemin (b) zamanlama diyagramlarını göstermektedir.
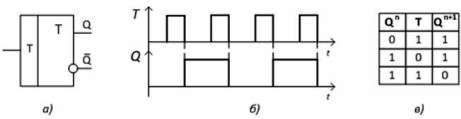
Şekil 4-T-flip-flop a) geleneksel grafik gösterimi, b) işlemin zamanlama diyagramları c) durum tablosu
Bir JK tetikleyici (İngiliz atlama — atlama, keer — tutma) iki veri girişi J ve K'ye ve bir saat girişi C'ye sahiptir. J ve K pimlerinin ataması, R ve S pimlerinin atamasına benzer, ancak tetik yasak kombinasyon yok. J = K = 1 ise durumunu tersine değiştirir (Şekil 5).
Girişlerin uygun şekilde bağlanmasıyla, tetikleyici RS-, D-, T-tetikleyicilerin fonksiyonlarını gerçekleştirebilir, örn. evrensel bir tetikleyicidir.
Şekil 5 -JK -flip-flop a) geleneksel -grafik notasyon, b) kısaltılmış durum tablosu
Karşılaştırıcı (karşılaştırın - karşılaştırın) — iki voltajı karşılaştıran bir cihaz — Uin'yi Uref referansıyla girin. Referans voltajı, pozitif veya negatif polariteye sahip sabit bir voltajdır, giriş voltajı zamanla değişir. İşlemsel yükselticiye dayalı en basit karşılaştırıcı devre Şekil 6'da gösterilmektedir, a. Uin Uop ise U çıkışında - us (Şek. 6, b).
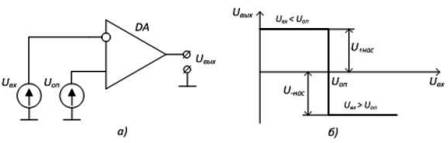
Şekil 6 - Op-amp karşılaştırıcısı: a) en basit şema b) performans özellikleri
Olumlu bir geri besleme karşılaştırıcısına Schmitt tetikleyicisi denir. Karşılaştırıcı aynı voltajda "1" den "0" a geçerse ve tersi olursa, farklı voltajlarda Schmitt tetiklenir. Referans voltajı bir PIC devresi R1R2 oluşturur, giriş sinyali op-amp'in evirici girişine beslenir. Şekil 7, b, Schmitt tetikleyicisinin aktarım özelliğini göstermektedir.
İşletim sisteminin envanter girişindeki negatif voltajda Uout = U + sat. Bu, ters çevirmeyen girişe pozitif bir voltajın etki ettiği anlamına gelir. Giriş voltajı arttıkça, akım Uin > Uneinv. (Uav — tetik) karşılaştırıcı Uout = U -sat durumuna gider. Evirmeyen girişe negatif bir voltaj uygulanır. Buna göre giriş gerilimindeki azalma ile Uin <Uneinv. (Uav — tetik) karşılaştırıcı Uout = U + sat durumuna geçer.
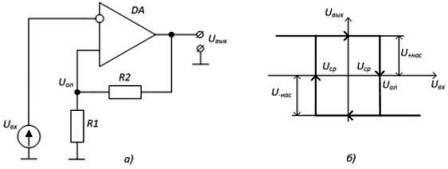
Şekil 7 - Bir op-amp'in Schmitt işlemi: a) en basit şema b) performans özellikleri
Bir örnek. Şekil 8, bir elektrik motorunun çalıştırılmasına, durdurulmasına ve tersine çevrilmesine izin veren bir elektrik motorunu kontrol etmek için bir röle kontaktörünün şemasını göstermektedir.
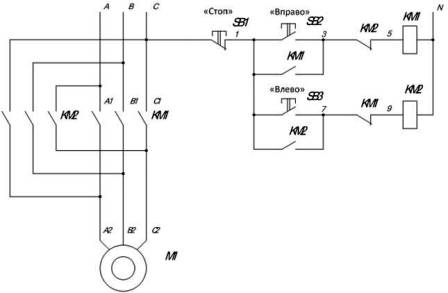
Şekil 8 - Röle kontaktör motor kontrol şeması
Elektrik motorunun komutasyonu manyetik yol vericiler KM1, KM2 tarafından gerçekleştirilir. Serbestçe kapatılan kontaklar KM1, KM2, manyetik yol vericilerin aynı anda çalışmasını engeller. Serbestçe açık kontaklar KM1, KM2, SB2 ve SB3 düğmelerinin kendiliğinden kilitlenmesini sağlar.
Çalışmanın güvenilirliğini artırmak için, röle kontaktör kontrol devrelerini ve güç devrelerini yarı iletken cihazlar ve cihazlar kullanan temassız bir sistemle değiştirmek gerekir.
Şekil 9, temassız bir motor kontrol devresini göstermektedir.
Manyetik yol vericilerin güç kontakları opto-simistörlerle değiştirildi: KM1-VS1-VS3, KM2-VS4-VS6. Optomizistörlerin kullanılması, düşük akımlı bir kontrol devresinin güçlü bir besleme devresinden izole edilmesini mümkün kılar.
Tetikleyiciler, kendinden kilitlemeli düğmeler SB2, SB3 sağlar. Mantık öğeleri VE manyetik başlatıcılardan yalnızca birinin aynı anda etkinleştirilmesini sağlar.
Transistör VT1 açıldığında, akım birinci opto-simistör VS1-VS3 grubunun LED'lerinden akar, böylece motor sargılarından akım akışı sağlanır Transistör VT2'nin açılması, ikinci opto-simistör VS4 grubunu besler -VS6, elektrik motorunun diğer yöne dönmesini sağlar.
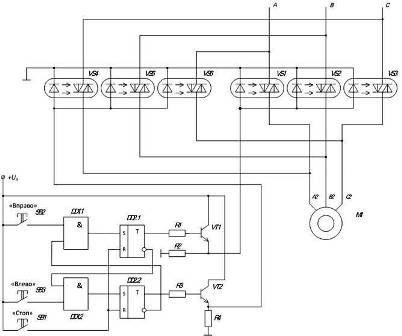
Şekil 9 - Temassız motor kontrol devresi
Kayıt - çok basamaklı ikili sayıların kısa süreli depolanması ve dönüştürülmesi için tasarlanmış bir elektronik cihaz. Kayıt, sayısı, kaydın saklayabileceği bir ikili sayının kaç bitini belirleyen parmak arası terliklerden oluşur - kaydın boyutu (Şekil 10, a). Tetikleyicilerin çalışmasını organize etmek için mantık öğeleri kullanılabilir.
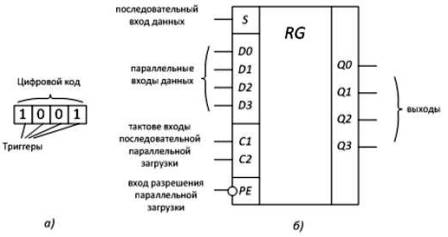
Şekil 10 — Kayıt: a) genel gösterim, b) geleneksel grafik gösterim
Bilgi giriş ve çıkış yöntemine göre, kayıtlar paralel ve seri olarak ayrılır.
Sıralı bir yazmaçta, parmak arası terlikler seri olarak bağlanır, yani önceki parmak arası terliklerin çıkışları sonraki parmak arası terliklerin girişlerine bilgi aktarır. Flip-flop saat girişleri C paralel bağlanır. Böyle bir kaydın bir veri girişi ve bir kontrol girişi vardır—saat girişi C.
Paralel kayıt aynı anda dört veri girişi olan parmak arası terliklere yazar.
Şekil 10, UGO'yu ve dört bitlik bir paralel seri kaydın pin tahsisini gösterir.