Elektrik motorunun çalışma prensibi ve cihazı
Herhangi bir elektrik motoru, kendisine uygulanan ve genellikle dönme hareketine dönüştürülen elektrik tüketimi nedeniyle mekanik iş yapmak üzere tasarlanmıştır. Teknolojide, çalışan gövdenin öteleme hareketini hemen yaratan modeller olmasına rağmen. Bunlara lineer motorlar denir.
Endüstriyel kurulumlarda elektrik motorları, teknolojik üretim sürecinde yer alan çeşitli metal kesme makinelerini ve mekanik cihazları çalıştırır.
Ev aletlerinin içinde elektrik motorları çamaşır makinelerini, elektrikli süpürgeleri, bilgisayarları, saç kurutma makinelerini, çocuk oyuncaklarını, saatleri ve diğer birçok cihazı çalıştırır.

Temel fiziksel süreçler ve eylem ilkesi
İçeride hareket ederken manyetik alan Elektrik akımları olarak adlandırılan elektrik yükleri, her zaman manyetik alan çizgilerinin yönüne dik bir düzlemde yönlerini saptırma eğiliminde olan mekanik bir kuvvete sahiptir.Bir elektrik akımı metal bir telden veya ondan yapılmış bir bobinden geçtiğinde, bu kuvvet akım taşıyan her bir teli ve bir bütün olarak tüm bobini hareket ettirme/döndürme eğilimindedir.
Aşağıdaki fotoğraf, içinden akım geçen metal bir çerçeveyi göstermektedir. Uygulanan bir manyetik alan, çerçevenin her bir dalı için bir dönme hareketi oluşturan bir F kuvveti oluşturur.

Kapalı bir iletken döngüde bir elektromotor kuvvetinin yaratılmasına dayanan elektrik ve manyetik enerjinin etkileşiminin bu özelliği, her elektrik motorunda çalıştırılır. Tasarımı şunları içerir:
-
içinden elektrik akımı geçen bobin. Sürtünme kuvvetlerine karşı direnci azaltmak için özel ankraj göbeği üzerine yerleştirilir ve döner yataklara sabitlenir. Bu tasarıma rotor denir;
-
kuvvet çizgileri ile rotor sargısının dönüşlerinden geçen elektrik yüklerine nüfuz eden bir manyetik alan oluşturan stator;
-
stator yerleştirmek için muhafaza. Gövdenin içinde, rotor yataklarının dış kafeslerinin monte edildiği özel yuvalar yapılmıştır.
En basit elektrik motorunun basitleştirilmiş tasarımı, aşağıdaki formun bir resmi ile temsil edilebilir.

Rotor döndüğünde, gücü cihazın genel tasarımına, uygulanan elektrik enerjisinin miktarına ve dönüşümler sırasındaki kayıplarına bağlı olan bir tork üretilir.
Motorun mümkün olan maksimum tork gücünün büyüklüğü, her zaman ona uygulanan elektrik enerjisinden daha azdır. Verimlilik değeri ile karakterizedir.
elektrik motoru türleri
Bobinlerden geçen akımın cinsine göre DC veya AC motorlar olarak ikiye ayrılırlar.Bu iki grubun her biri, farklı teknolojik süreçler kullanılarak çok sayıda modifikasyona sahiptir.
DC motorlar
Sabit bir sabit tarafından oluşturulan bir stator manyetik alanına sahiptirler. kalıcı mıknatıslar veya uyarma bobinli özel elektromıknatıslar. Armatür bobini, yataklara sabitlenmiş ve kendi ekseni etrafında serbestçe dönebilen mile sıkıca monte edilmiştir.
Böyle bir motorun temel yapısı şekilde gösterilmiştir.

Ferromanyetik malzemeden imal edilen armatürün çekirdeğinde, bir ucu iletken toplayıcı plakalara diğer ucu birbirine bağlı seri bağlı iki parçadan oluşan bir bobin bulunmaktadır. Armatürün taban tabana zıt uçlarında iki grafit fırça bulunur ve toplayıcı plakaların temas yüzeylerine bastırılır.
Alt model fırçasına pozitif bir DC kaynak potansiyeli ve üsttekine negatif bir potansiyel uygulanır. Bobinden geçen akımın yönü kesikli kırmızı okla gösterilmiştir.
Akım, manyetik alanın armatürün sol alt köşesinde bir kuzey kutbuna ve armatürün sağ üst köşesinde bir güney kutbuna sahip olmasına neden olur (yalpalama kuralı). Bu, rotor kutuplarının aynı adı taşıyan durağan kutuplardan itilmesine ve statorun zıt kutuplarına çekilmesine neden olur. Uygulanan kuvvetin bir sonucu olarak, yönü kahverengi bir okla gösterilen bir dönme hareketi meydana gelir.
Armatürün ataletle daha fazla dönmesiyle, kutuplar diğer toplayıcı plakalara aktarılır. İçlerindeki akımın yönü tersine çevrilir. Rotor daha fazla dönmeye devam eder.
Böyle bir toplayıcı cihazın basit tasarımı, büyük elektrik enerjisi kayıplarına yol açar.Bu tür motorlar, basit tasarımlı cihazlarda veya çocuklar için oyuncaklarda çalışır.
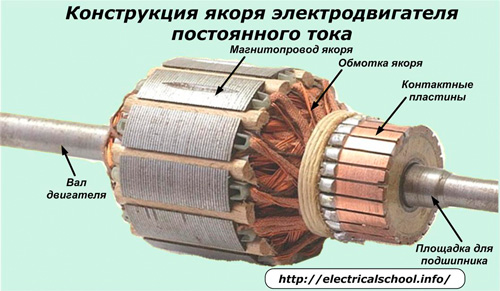
Üretim sürecinde yer alan doğru akım elektrik motorları daha karmaşık bir tasarıma sahiptir:
-
bobin ikiye değil, birkaç parçaya bölünmüştür;
-
bobinin her bölümü kendi direğine monte edilmiştir;
-
toplayıcı cihaz, sargı sayısına göre belirli sayıda kontak pedi ile yapılır.
Sonuç olarak, her bir kutbun kontak plakaları vasıtasıyla fırçalara ve akım kaynağına düzgün bir bağlantısı oluşturulur ve enerji kayıpları azaltılır.
Böyle bir çapanın cihazı fotoğrafta gösterilmiştir.
DC motorlarda rotorun dönüş yönü tersine çevrilebilir. Bunun için kaynakta polariteyi değiştirerek bobindeki akımın hareketini tersine çevirmek yeterlidir.
AC motorlar
Bobinlerinde akan elektrik akımının şu şekilde açıklanmasıyla önceki tasarımlardan farklıdırlar: sinüzoidal harmonik yasasıperiyodik olarak yönünü değiştirerek (işaret). Onlara güç sağlamak için, alternatif işaretlere sahip jeneratörlerden voltaj sağlanır.
Bu tür motorların statoru bir manyetik devre tarafından gerçekleştirilir. Bobinin dönüşlerinin bir çerçeve (bobin) konfigürasyonu ile yerleştirildiği oluklu ferromanyetik plakalardan yapılmıştır.

senkron elektrik motorları
Aşağıdaki fotoğraf, rotor ve statorun elektromanyetik alanlarının senkron dönüşü ile tek fazlı bir AC motorun çalışma prensibini göstermektedir.

Statorun manyetik devresinin oluklarında, çapsal olarak zıt uçlarda, içinden alternatif bir akımın aktığı bir çerçeve şeklinde şematik olarak gösterilen sargı telleri yerleştirilir.
Yarım dalgasının pozitif kısmının geçişine karşılık gelen zamandaki durumu ele alalım.
Yatak hücrelerinde, yerleşik kalıcı mıknatısa sahip bir rotor serbestçe döner ve burada direğin kuzey "N ağzı" ve güney "S ağzı" açıkça tanımlanır. Stator sargısından pozitif bir yarım dalga akımı geçtiğinde, içinde «S st» ve «N st» kutupları olan bir manyetik alan yaratılır.
Rotorun ve statorun manyetik alanları arasında (kutupların birbirini itmesi ve kutupların aksine çekmesi) arasında ortaya çıkan etkileşim kuvvetleri, zıt kutuplar birbirine mümkün olduğu kadar yakın yerleştirildiğinde motor armatürünü herhangi bir konumdan en uç noktaya döndürme eğilimindedir. bir diğer.
Aynı durumu göz önünde bulundurursak, ancak zamanın tersi olduğu an için - çerçeve telinden negatif bir yarım dalga akımı geçerse, armatürün dönüşü ters yönde gerçekleşir.
Rotorun statorda sürekli hareketini sağlamak için, bir sargı çerçevesi değil, her birine ayrı bir akım kaynağı tarafından güç verildiği göz önüne alındığında, belirli sayıda çerçeve yapılır.
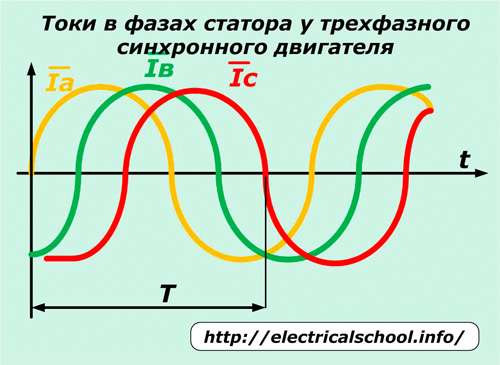
Senkron dönüşlü üç fazlı bir AC motorun çalışma prensibi, rotor ve statorun elektromanyetik alanları aşağıdaki resimde gösterilmektedir.

Bu tasarımda, üç bobin A, B ve C birbirine 120 derecelik açılarla kaydırılmış olarak stator manyetik devresinin içine monte edilmiştir. Bobin A sarı, B yeşil ve C kırmızı olarak işaretlenmiştir. Her bobin, önceki durumda olduğu gibi aynı çerçevelerle yapılır.
Resimde, herhangi bir durumda, akım, «+» ve «-« işaretleri ile gösterilen, ileri veya geri yönde yalnızca bir bobinden akmaktadır.
Pozitif yarım dalga faz A'dan ileri yönde geçtiğinde rotor alanının ekseni yatay bir pozisyon alır çünkü statorun manyetik kutupları bu düzlemde oluşur ve hareketli armatürü çeker. Rotorun zıt kutupları, statorun kutuplarına yaklaşma eğilimindedir.
Pozitif yarım dalga faz C'ye girdiğinde, armatür saat yönünde 60 derece dönecektir. B fazına akım uygulandığında, benzer bir armatür dönüşü meydana gelir. Bir sonraki sargının bir sonraki aşamasındaki sonraki her akım akışı rotoru döndürecektir.
Her sargıya 120 derecelik bir açıyla kaydırılan üç fazlı bir şebeke voltajı uygulanırsa, armatürü döndürecek ve uygulanan elektromanyetik alanla senkron dönüşünü oluşturacak olan alternatif akımlar bunlarda dolaşacaktır.
Üç fazlı bir step motorda da aynı mekanik tasarım başarıyla kullanılmaktadır… Her sargıda sadece kontrol ile özel kontrolör (step motor sürücüsü) Sabit darbeler, yukarıda açıklanan algoritmaya göre uygulanır ve kaldırılır.
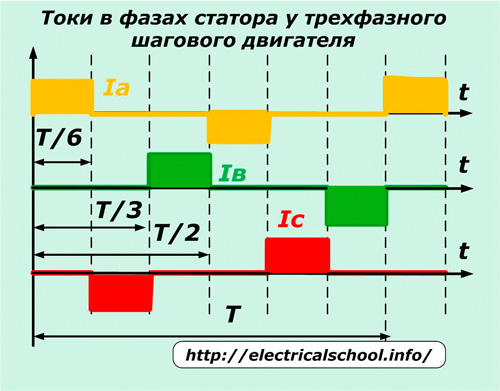
Başlatılmaları bir dönme hareketi başlatır ve belirli bir zamanda sonlanmaları, milin ölçülü bir şekilde dönmesini ve belirli teknolojik işlemleri gerçekleştirmek için programlanmış bir açıda durmasını sağlar.
Açıklanan her iki üç fazlı sistemde de armatürün dönüş yönünü değiştirmek mümkündür. Bunu yapmak için, "A" - "B" - "C" aşamalarının sırasını bir başkasına, örneğin "A" - "C" - "B" ye değiştirmeniz yeterlidir.
Rotorun hızı, T periyodunun uzunluğu ile düzenlenir. Azaltılması, dönüşün hızlanmasına yol açar.Fazdaki akımın genliğinin büyüklüğü, sargının iç direncine ve ona uygulanan voltajın değerine bağlıdır. Elektrik motorunun tork miktarını ve gücünü belirler.
asenkron motorlar
Bu motor tasarımları, daha önce tartışılan tek fazlı ve üç fazlı modellerdeki sargılarla aynı stator manyetik devresine sahiptir. İsimlerini armatür ve stator elektromanyetik alanlarının asenkron dönüşünden alırlar. Bu, rotorun konfigürasyonunu iyileştirerek yapılır.
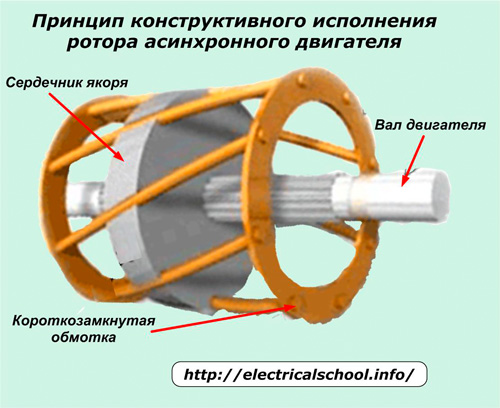
Çekirdeği yivli elektrikli çelik levhalardan yapılmıştır. Armatür uçlarında iletken halkalarla kapatılan alüminyum veya bakır akım iletkenleri ile donatılmıştır.
Stator sargılarına voltaj uygulandığında, rotor sargısında elektromotor kuvveti ile bir elektrik akımı indüklenir ve bir armatür manyetik alanı oluşturulur. Bu elektromanyetik alanlar etkileştiğinde motor mili dönmeye başlar.
Bu tasarım ile rotorun hareketi ancak statorda dönen bir elektromanyetik alan oluştuktan sonra mümkün olur ve onunla asenkron çalışma modunda devam eder.
Asenkron motorların tasarımı daha basittir, bu nedenle daha ucuzdur ve endüstriyel tesislerde ve ev aletlerinde yaygın olarak kullanılır.

ABB patlamaya dayanıklı elektrik motoru
lineer motorlar
Endüstriyel mekanizmaların birçok çalışma gövdesi, metal işleme makinelerinin, araçların, kazık çakarken çekiç darbelerinin çalışması için gerekli olan tek bir düzlemde ileri geri veya öteleme hareketi gerçekleştirir ...
Böyle bir çalışan gövdenin dişli kutuları, vidalı miller, kayışlı tahrikler ve benzeri mekanik cihazlar vasıtasıyla döner bir elektrik motorundan hareket ettirilmesi tasarımı zorlaştırmaktadır. Bu sorunun modern teknik çözümü, doğrusal bir elektrik motorunun çalışmasıdır.
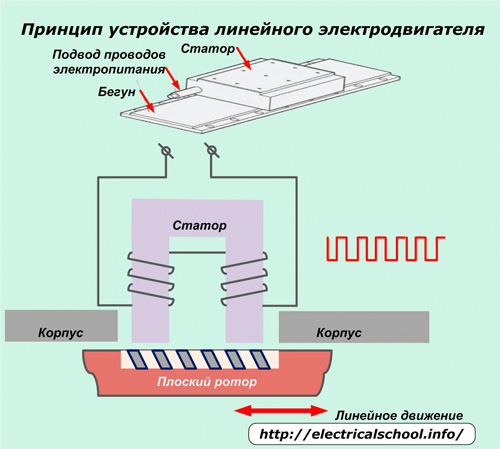
Statoru ve rotoru, döner elektrik motorlarında olduğu gibi halkalar halinde sarılmak yerine şeritler halinde uzatılmıştır.
Çalışma prensibi, belirli bir uzunlukta açık bir manyetik devre ile sabit bir statordan elektromanyetik enerjinin aktarılması nedeniyle yolluk rotoruna ileri geri doğrusal hareket kazandırmaktır. Akımı sırayla açarak içinde çalışan bir manyetik alan oluşturulur.
Kolektör ile armatür sargısına etki eder. Böyle bir motorda ortaya çıkan kuvvetler, rotoru sadece kılavuz elemanlar boyunca doğrusal bir yönde hareket ettirir.
Lineer motorlar, doğru akım veya alternatif akımda çalışacak şekilde tasarlanmıştır ve senkron veya asenkron modda çalışabilirler.
Lineer motorların dezavantajları şunlardır:
-
teknolojinin karmaşıklığı;
-
yüksek fiyat;
-
düşük enerji verimliliği.